Vektorový prostor
Vektorový prostor (též lineární prostor, anglicky vector space) je ústředním objektem studia lineární algebry, v jehož rámci jsou definovány všechny ostatní důležité pojmy této disciplíny. V jistém smyslu můžeme vektorový prostor chápat jako zobecnění množiny reálných, potažmo komplexních, čísel. Podobně jako v těchto množinách je i ve vektorovém prostoru definována operace sčítání a násobení s jistými přirozenými omezeními jako asociativita apod. Prvek vektorového prostoru se nazývá vektor (angl. vector). Na vektorovém prostoru je důležité, že má lineární matematickou strukturu, tzn. dva vektory lze sečíst, přičemž tento součet je opět prvkem vektorového prostoru, a totéž platí i pro násobek vektoru. S konceptem vektorového prostoru se lze setkat v nejrůznějších odvětvích matematiky i fyziky. Tvoří základ, v rámci něhož lze elegantně popisovat a řešit jak úlohy numerické matematiky, tak třeba i úlohy chování fyzikálních systémů v klasické či kvantové mechanice.
Historie
Vektorový prostor je poměrně mladý matematický pojem, který vznikl abstrakcí dosud známých matematických objektů jako byly matice, soustavy lineárních rovnic nebo vektory ve fyzice. Podobně jako u samotné lineární algebry lze jeho vznik klást do konce devatenáctého a počátku dvacátého století. Slovo vektor pak pochází z latinského vector znamenající nosič. Oproti skaláru se totiž vyznačuje navíc tím, že "nese" i směr.
První náznak pojmu vektorového prostoru lze najít v díle Die lineale Ausdehnungslehre, ein neuer Zweig der Mathematik od Hermanna Grassmanna z roku 1844[1]. Jeho práce však zůstala téměř nepovšimnuta, protože Grassmann nebyl profesionální matematik a svoji teorii popisoval filozofickým způsobem, který byl pro ostatní matematiky těžko srozumitelný. Přitom to byl on, kdo jako první zavedl pojmy lineární kombinace, lineární nezávislosti, dimenze, lineární obal, báze a další. Navíc též dokázal tvrzení, která nyní známe pod názvy Steinitzova věta o výměně, první věta o dimenzi, nezávislost dimenze na volbě báze, vzorec pro transformaci souřadnic při přechodu mezi dvěma bázemi vektorového prostoru a jiné.
Axiomatickou definici vektorového prostoru pak jako první podává Giuseppe Peano ve svém díle Calcolo geometrico secundo l’Ausdehnungslehre di H. Grassmann, precedutto dalle operazioni della logica deduttiva z roku 1888. Vektorový prostor v dnešní podobě je poprvé definován v dizertační práci Stefana Banacha v roce 1920 a v moderních učebnicích se tento pojem poprvé objevuje v učebnici Modern Algebra od van der Waerdena z roku 1930. Více viz[1] a článek Lineární algebra.
Motivace
Jako motivaci pro zavedení pojmu vektorového prostoru uvažujme dva případy matematických objektů – fyzikální vektory (coby šipky) a polynomy. Pro každý z těchto případů podáme jeho základní charakteristiku a pokusíme se najít vlastnosti, které mají oba tyto případy společné. To nás už přímo povede k definování matematické struktury, splňující jisté vlastnosti, kterou půjde použít jak k popisu fyzikálních vektorů, tak k popisu polynomů. Touto matematickou strukturou bude právě vektorový prostor.
Fyzikální vektory
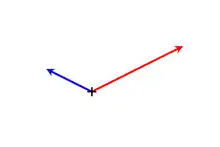

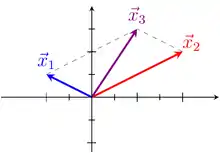
Jako první si představme fyzikální vektory, chápané jako šipky v rovině. Pro názornost mějme puk na ledové ploše a snažme se popsat jeho pohyb po ledě v závislosti na úderech hokejky dopadající na jeho strany s různou intenzitou a v různých směrech. Každý úder hokejky lze popsat velikostí síly, se kterou zasáhla puk, a směrem jejího působení. Úder můžeme tedy přirozeně vyjádřit jako šipku v rovině, jejíž délka odpovídá působící síle a její směr směru působící síly. Zajímá nás nyní, kam se puk posune, bude-li na něj v jeden okamžik působit více než jedna hokejka. V takovém případě se puk posune ve směru výslednice působících sil a jeho posunutí bude úměrné velikosti této výslednice. Výslednici sil přitom obdržíme složením všech "šipek", které v daný okamžik na puk působí. Pro konkrétnost uvažujme, že se nacházíme v situaci popsané obrázkem Obr. 1 vpravo, kde máme dvě působící síly. Abychom mohli s těmito šipkami lépe pracovat, zaveďme si na ledové ploše souřadnicovou soustavu a označme si šipky po řadě symboly a , jak je ukázáno na Obr. 2. Výslednice těchto dvou šipek pak vznikne jejich složením, označme si ji , viz Obr. 3. Složením dvou šipek jsme tedy opět obdrželi nějakou šipku, která nyní popisuje výslednici působících sil popsaných šipkami a – výsledek naprosto zjevný, pro další diskuzi však klíčový. Pokud pohlédneme na souřadnice jednotlivých šipek v námi zavedené souřadnicové soustavě, dostáváme




kde jsou jednotlivé barvy zvoleny tak, aby byl zjevný vztah čísel k obrázkům vpravo. Pod souřadnicemi šipky jsou myšleny souřadnice bodu, ve kterém šipka "končí". Není třeba vypisovat souřadnice bodu, ve kterém šipka "začíná", protože všechny šipky, včetně výslednic a násobků, začínají v tomtéž bodě – puku (který má v naší souřadné soustavě souřadnice ). Pokud se nyní podíváme na souřadnice výslednice sil , vidíme, že horní složka má hodnotu 1 (x-ová souřadnice) a spodní (y-ová souřadnice) má hodnotu 1,5 (viz Obr. 3, jeden dílek na ose představuje hodnotu 0,5). Pro souřadnice vektorů tedy platí vztah


Pokud výše uvedenou rovnost přepíšeme do kompaktnějšího tvaru, máme . Dá se ukázat, že tento vztah platí obecně pro jakoukoli volbu šipek a a jejich výslednici . Vidíme tedy, že výslednici dvou působících sil a můžeme vyjádřit jako jejich součet .


Dále je zřejmé, že pokud na puk udeříme dvakrát vyšší silou, tak odpovídající šipka bude dvakrát delší, ale zachová si svůj směr. Obecně tedy, mějme nějakou šipku odpovídající jisté síle. Pak -krát vyšší síle bude odpovídat -krát delší šipka, která bude mít stejný směr jako .

Můžeme tedy šipky různě násobit číslem a vzájemně sčítat a opět dostaneme nějakou šipku. Zároveň je vidět, že je jedno jestli složím šipku se šipkou , nebo naopak. Neboli

Této vlastnosti se říká komutativita. Mějme nyní tři šipky . Podobně jako v předchozím případě je jedno, jestli nejdříve složím šipku se šipkou a jejich výslednici složím se šipkou , nebo jestli nejdříve složím šipku se šipkou a jejich výslednici se šipkou . Neboli


Této vlastnosti se říká asociativita. Je také vidět, že pokud k jakémukoli vektoru přičtu vektor

tak dostanu opět vektor . Vektoru odpovídá "šipka" nulové délky a říká se mu nulový vektor. A konečně také vidíme, že když přesně proti sobě na puk působí dvě síly a stejné velikosti, tak se jejich účinek vyruší, tj. puk stojí na místě. Neboli jejich výslednice, tj. součet, je nulový vektor. Tedy , neboli . Máme-li nějaký vektor , tak k němu vždy, jak vidíme, existuje jistý vektor takový, že jejich výslednice je nulový vektor. Vektoru říkáme vektor opačný k vektoru .






Shrňme si nyní, na co jsme zatím přišli:
- Šipky lze sčítat a násobit číslem. Součet dvou šipek je opět šipka. Podobně násobek šipky je opět šipka.
- Sčítání šipek je komutativní.
- Sčítání šipek je asociativní.
- "Šipku nulové délky", nulový vektor, můžu přičíst k libovolné jiné šipce, aniž bych tuto změnil.
- Ke každé šipce najdu šipku k ní opačnou, opačný vektor.
Podobnou diskuzi vztahu šipek a "fyzikálních" vektorů lze nalézt v oddíle Geometrická interpretace v článku lineární kombinace.
Polynomy jako vektory
Když jsme nyní vypsali základní vlastnosti množiny šipek spolu s jejich sčítáním a násobením číslem, přesuňme svoji pozornost na polynomy. Neboli na funkce tvaru

- .

Když sečteme dva polynomy a , tak dostaneme funkci


což je ale opět polynom, jehož koeficienty jsou nyní rovny součtům koeficientů polynomu a polynomu . Tyto koeficienty jsou zjevně stejné bez ohledu na pořadí sčítání a , neboli

Platí tedy komutativita. Snadno by se ověřila i asociativita sčítání. Též je vidět, že funkce vzniklá vynásobením polynomu číslem je opět polynom, který má nyní koeficienty rovné , kde jsou koeficienty polynomu . Dále je patrné, že nulová funkce, která každému bodu přiřazuje nulu, je polynom (jehož všechny koeficienty jsou nulové). Říkáme mu nulový polynom. Když k nulovému polynomu přičteme libovolný polynom, tak součet bude roven přičítanému polynomu. Konečně, mějme nějaký polynom . Když ho vynásobíme číslem -1, tak dostaneme polynom , kterému říkáme opačný polynom. Platí, že





Součet polynomu a k němu opačného polynomu tedy dává nulový polynom. Opět si shrňme dosavadní zjištění:
- Součet dvou polynomů je opět polynom. Podobně násobek polynomu číslem je opět polynom.
- Sčítání polynomů je komutativní.
- Sčítání polynomů je asociativní.
- Když k nulovému polynomu přičtu libovolný polynom, tak bude součet roven přičítanému polynomu.
- Ke každému polynomu najdu polynom k němu opačný.
Společné vlastnosti
Seznam vlastností šipek i seznam vlastností polynomů výše byly záměrně napsány v co nejshodnější podobě. Jak vidíme, i přes zjevnou rozdílnost mají šipky i polynomy mnoho vlastností totožných. Jde například o komutativitu či asociativitu sčítání nebo o existenci nulového prvku. Podobnosti mezi vlastnostmi různých matematických objektů, jako v případě těch dvou výše zmíněných, vedly matematiky k zavedení matematické struktury, která je určena právě těmito vlastnosti. Jedná se o množinu, kdy není specifikován konkrétní tvar jejích prvků, ale zajímají nás především jejich vzájemné vztahy. Nezáleží tedy moc na tom, zda uvažujeme šipky či polynomy, ale velkou roli hraje např. to, že oboje lze sčítat a nezáleží na pořadí sčítání.
Mějme nyní tedy množinu, kterou si označme a jejíž prvky budeme značit v analogii se šipkami jako , aniž bychom nějak blíže věděli, co tyto prvky jsou. Nezajímá nás tedy, zda je šipka či polynom. Po těchto prvcích však požadujeme, aby splňovaly následující vlastnosti:


- Součet dvou prvků je opět prvek . Podobně násobek prvku číslem leží opět ve . Jinými slovy, množina je uzavřená na operace sčítání a násobení číslem.
- Sčítání prvků je komutativní.
- Sčítání prvků je asociativní.
- Když k nulovému prvku přičtu libovolný prvek, tak bude součet roven přičítanému prvku.
- Ke každému prvku najdu prvek k němu opačný.
Dosud jsme uvažovali prvky z násobené číslem. Pojem čísla je ale pro matematiku příliš konkrétní a tak lze místo množiny čísel uvažovat obecnější množinu, tzv. těleso. Těleso samotné má pak také dodatečnou strukturu určenou požadavky, které se podobají těm, které klademe na prvky množiny . Označme si těleso písmenem . Konkrétně od něho požadujeme, aby pro libovolné dva prvky tělesa platilo:


- Součet je také prvek .
- Násobek je také prvek .
- Prvek opačný k , tj. je také prvek .
- Pro každý nenulový prvek je také prvek .




Těleso je tedy množina vybavená operací sčítání a operací násobení. První dva požadavky výše vyjadřují, že je těleso pro tyto dvě operace uzavřené. Můžeme v něm navíc najít jak neutrální prvek vůči operaci sčítání, který označujeme 0, tak i neutrální prvek vůči operaci násobení, který označujeme 1. Výraz ve čtvrtém bodě výše pak vyjadřuje inverzní prvek pro vůči operaci násobení.
Dospěli jsme tak zatím k matematické struktuře sestávající z množiny , ke které je přidruženo těleso , přičemž součet prvků z a jejich násobek prvkem z leží opět ve a přitom jsou splněny jisté dodatečné podmínky. Když matematicky precizně přeformulujeme právě uvedené požadavky, dodáme pár požadavků dalších a celou věc trochu zobecníme, tak dospíváme k současné definici vektorového prostoru jak je podána v následujícím oddíle.
Definice
Nechť jsou dány
- neprázdná množina , jejíž prvky nazýváme vektory,
- těleso (s operacemi sčítání + a násobení ),
- zobrazení , jež nazýváme sčítání vektorů,
- zobrazení , jež nazýváme násobení vektoru (prvkem z tělesa; skalárem).



Řekneme, že je vektorový prostor nad tělesem s vektorovými operacemi , právě když je množina uzavřená na operace a a současně platí tzv. axiomy vektorového prostoru. Těchto axiomů je osm a jejich znění je následující:



| Č. | Slovně | Symbolicky |
|---|---|---|
| 1 | komutativita pro sčítání vektorů | |
| 2 | asociativita pro sčítání vektorů | |
| 3 | existence nulového vektoru | |
| 4 | existence opačného vektoru | |
| 5 | asociativita pro násobení vektoru | |
| 6 | invariance vektoru při vynásobení jednotkovým prvkem tělesa | |
| 7 | distributivita násobení vektoru vzhledem ke sčítání prvků tělesa | |
| 8 | distributivita násobení vektoru vzhledem ke sčítání vektorů |








Axiomy 1 až 4 vyjadřují, že množina tvoří vzhledem ke sčítání vektorů komutativní grupu, kde nulový vektor představuje neutrální prvek grupy a opačný vektor představuje inverzní prvek k danému prvku grupy alias vektoru. Z definice operací a implicitně vyplývá, že uvažujeme pouze ty operace sčítání vektorů a násobení vektoru prvkem z tělesa, pro něž je množina uzavřená. Běžně se místo znaku pro sčítání používá znaménko + a místo znaku pro násobení se užívá znaménka . Zde byly tyto symboly použity, aby se odlišilo sčítání dvou vektorů a sčítání dvou prvků tělesa, resp. násobení vektoru prvkem tělesa a násobení dvou prvků tělesa. Z kontextu je ale vždy patrné, kterou operaci je nutno použít.
Zdaleka nejčastěji se uvažují číselná tělesa reálných či komplexních čísel. Vektorový prostor nad tělesem reálných čísel se nazývá reálný vektorový prostor, vektorový prostor nad tělesem komplexních čísel se pak jmenuje komplexní vektorový prostor. Vektorový prostor obsahující pouze nulový vektor se označuje jako nulový (nebo triviální) vektorový prostor. Triviální prostor je nejjednodušším příkladem vektorového prostoru. Dokonce z definice tělesa vyplývá, že i těleso samotné je spolu s operací sčítání a násobení prvkem z tělesa vektorovým prostorem samo nad sebou.


Pro značení vektorů se používají různé notace, nejčastěji se lze setkat buď s polotučným sázením symbolů pro vektory jako x, y, z, anebo se symboly vysázenými italikou majícími nad sebou šipku jako . Zde se budeme držet druhé jmenované konvence. Přísně vzato je z definice vektorový prostor uspořádaná čtveřice , obvykle se ale takový vektorový prostor značí prostě jako a buď se předpokládá, že čtenář ví, které těleso a operace jsou použity, nebo jsou tyto specifikovány vždy při definici množiny . V případě běžně používaných vektorových prostorů jako např. jsou příslušné operace a dané těleso definovány v podstatě kanonicky a nemůže dojít k nejasnostem.



Stejně jako u každé jiné množiny, můžeme i v případě vektorového prostoru uvažovat jeho podmnožiny. Máme na mysli konkrétně podmnožiny množiny , kde je daný vektorový prostor. Výsadní postavení mezi všemi podmnožinami mají pak ty z nich, které jsou sami o sobě vektorovými prostory. Tyto podmnožiny nazýváme podprostory daného vektorového prostoru. Více viz článek Vektorový podprostor.
Obecné vlastnosti
V následujícím uvažujeme vektorový prostor nad tělesem . Z definice vektorového prostoru lze dokázat například tyto vlastnosti:
- Nulový vektor je právě jeden, tj.


- Důkaz: Z axiómů máme zajištěnu existenci přinejmenším jednoho nulového vektoru. Předpokládejme, že jich je víc a uvažujme dva nějaké nulové vektory , kdy . Pak platí , kde jsme po řadě využili axiomů 3, 1 a opět 3. Vidíme tedy, že , což je spor.




- Ke každému vektoru existuje právě jeden vektor opačný. Tento se obvykle značí . V matematickém zápise


- Důkaz: Opět máme z axiomů zajištěnu existenci alespoň jednoho opačného vektoru k danému vektoru . Předpokládejme existenci alespoň dvou opačných navzájem různých vektorů . Pak platí , kde jsme použili 3., 4., 2. ,1. a opět 4., 1. a 3. axiomu. Máme tedy , což je spor.



- Pro každé dva vektory má rovnice právě jedno řešení , tj.




- Důkaz: Daný předpis pro vypsaný výše zřejmě řeší danou rovnici, stačí dosadit a použít po řadě 2., 4., 1. a 3. axiom. Dokažme jednoznačnost řešení. Pro spor předpokládejme, že existují dvě řešení , , . K poslední rovnosti můžeme zleva přičíst opačný vektor k , tj. dostaneme , což je však podle 2., 1. a 4. axiomu ekvivalentní výrazu . Dospěli jsme tedy ke sporu.






- Libovolný násobek nulového vektoru je nulový vektor. Podobně, nulový násobek libovolného vektoru je nulový vektor. Neboli (0 je neutrální prvek pro sčítání v )


- Důkaz: Uvažujme nejprve a dokazujme první vlastnost. Mějme libovolný vektor a výraz . Vektor se tedy сhová jako nulový vektor a z již dokázané jednoznačnosti nulového vektoru musí platit . Případ pro je podpřípadem druhé vlastnosti, kterou nyní dokážeme. Mějme rovnici , kde je naší neznámou vektor . Vidíme, že rovnici vyhovuje volba . Když ale dosadíme , tak máme , tj. . Přitom levá strana je rovna straně pravé. Rovnost je tedy splněna i pro a z jednoznačnosti řešení dokázané výše musí nutně .











- Vlastnost:

- Důkaz: Implikace zprava doleva plyne z předchozího tvrzení. Implikaci zleva doprava dokažme sporem. Předpokládejme tedy, že a přitom a současně . Obě strany rovnice můžu tedy vynásobit prvkem dostávajíc . Pravá strana rovnosti je ale podle předchozího tvrzení rovna nule a tedy , což je spor.




- Vlastnost:

- Důkaz: Uvažujme rovnici , jejíž řešení je zjevně . Současně ale a je tedy též řešením. Navíc a je tedy též řešením. Z již výše dokázané jednoznačnosti řešení rovnice tedy plyne .







- Opačný vektor k danému vektoru lze získat tak, že ho vynásobíme prvkem z tělesa, který je opačný k jednotkovému prvku. Neboli

- Důkaz: Plyne z předchozího tvrzení položením .

Vektorové operace s množinami
Kromě aritmetických operací definovaných nad samotnými vektory a prvky tělesa můžeme též uvažovat obdobné operace nad celými množinami vektorů potažmo prvků tělesa. Zavedení těchto operací umožňuje mimo jiné kompaktnější zápis některých vztahů mezi množinami vektorů a dává tak vyniknout jejich vzájemným souvislostem.
Mějme vektorový prostor nad tělesem . Dále uvažujme dvě neprázdné podmnožiny a vektorového prostoru . Pro tyto můžeme definovat jejich součet následujícím způsobem:



Součet dvou podmnožin vektorového prostoru nazýváme direktní součet, právě když lze každý vektor z množiny vyjádřit ve tvaru právě jedním způsobem, kde a . Direktní součet množin a značíme . Neboli






Uvažujeme-li ještě neprázdnou podmnožinu tělesa , tak jako násobek množiny a označujeme množinu


Běžně se pro zjednodušení zápisu používají následující konvence ():





Pro operace sčítání a násobení nad podmnožinami vektorového prostoru, resp. tělesa, lze snadno odvodit následující vlastnosti ():

- operace sčítání množin je komutativní a asociativní,
- platí zřejmě , ale obecně rozhodně neplatí, že by rozdíl byla množina obsahující jen nulový vektor; pokud je vektorový podprostor prostoru , tak dokonce platí rovnost .








Tam, kde je výše místo rovnosti vyznačená jen inkluze, obecně rovnost neplatí. Ukažme si vzhledem k inkluzi ještě jedno další tvrzení, jehož důkaz je triviální:
- Buď vektorový prostor nad tělesem a , jeho neprázdné podmnožiny splňující vztah a . Buďte dále neprázdné podmnožiny tělesa splňující . Pak platí







V souvislosti s direktním součtem dvou vektorových podprostorů je velmi užitečné si uvézt následující tvrzení:
- Součet je direktním součtem, tj. , právě když v průniku podprostorů a leží právě jen nulový vektor. To jest

Pro důkaz viz oddíl Rovnosti a inkluze v článku Vektorový podprostor.
Základní pojmy
Uveďme si nejprve několik pojmů, které se úzce vážou k vektorům a jejich množinám. Tyto pojmy nám pak pomohou lépe pochopit strukturu vektorového prostoru a umožní i snazší zacházení s vektory.
Lineární kombinace
Nejzákladnější věc, kterou můžeme s vektory udělat, je sečíst je nebo je vynásobit prvkem z tělesa. Když budeme mít vektorů , z nichž každý vynásobíme prvkem z tělesa (prvky ) a nakonec je všechny sečteme, tak dostaneme vektor




Tento vektor nazýváme lineární kombinace vektorů .
Lineární nezávislost
Pojem lineární nezávislosti zachycuje intuitivní fakt, že některé vektory si jsou podobnější než jiné. Máme-li například dvě šipky stejného směru, ale různé délky, pak dokážeme jednu šipku vyjádřit jako násobek druhé šipky. Šipky jsou tedy v jistém smyslu na sobě závislé. Budeme-li ale mít dvě šipky různých směrů, pak jednu nedokážeme vhodným násobkem převést na šipku druhou. Obě šipky jsou tedy na sobě nezávislé. Obecněji, pokud máme šipek a přitom -tou šipku jsme schopni vyjádřit jako lineární kombinaci předchozích šipek, pak říkáme, že jsou tyto šipky alias vektory lineárně závislé. Pokud nejsme schopni žádnou ze šipek vyjádřit jako lineární kombinaci šipek ostatních, pak říkáme, že jsou tyto šipky lineárně nezávislé.

Dimenze
Vraťme se na chvíli k oddílu Motivace výše na případ šipek v rovině a na polynomy. Abychom mohli šipky vhodně popisovat, zavedli jsme si v rovině souřadnicovou soustavu. Každé šipce jsme tedy schopni jednoznačně přiřadit dvojici čísel – její -ovou a -ovou souřadnici v dané souřadnicové soustavě. Vidíme tedy, že nám k plnému určení šipky v rovině stačí dvě čísla. Zkoumejme nyní případ polynomů. Označme si množinu všech polynomů jako . Víme, že obecný tvar polynomu vypadá následovně



- ,
kde je nějaké přirozené číslo vyjadřující stupeň polynomu. Pokud nenaložíme omezení na velikost tohoto čísla, tak může nabývat libovolně velké hodnoty. Máme-li tedy množinu všech polynomů , tak ať nás napadne jakkoli velké , tak určitě v této množině nalezneme polynom, jehož stupeň je právě . Každý polynom je popsán svými koeficienty, pokud může být ale libovolně velké, může být libovolně velký i počet koeficientů polynomu, který "náhodně vytáhneme" z množiny . Protože dopředu nevíme, jaký polynom "vytáhneme", musíme uvažovat nejhorší možný případ, tj. když je koeficientů nekonečně mnoho. Pro popis libovolného polynomu z množiny je tedy nutno nekonečně mnoho čísel. To je v protikladu k případu šipek v rovině, k jejichž plnému určení stačila čísla dvě. O prostoru šipek pak říkáme, že má dimenzi dva, o prostoru všech polynomů pak, že jeho dimenze je nekonečná. Získali jsme tak nejvýraznější charakteristiku vektorových prostorů – buď mají konečnou dimenzi, anebo nekonečnou.

Pojem dimenze lze formalizovat následovně: pokud ve vektorovém prostoru existuje vektorů, které jsou lineárně nezávislé, a přitom každý soubor vektorů už je lineárně závislý, tak má daný vektorový prostor dimenzi rovnou . Pokud pro každé najdu ve vektorovém prostoru lineárně nezávislý soubor vektorů, pak je daný vektorový prostor nekonečné dimenze.

Báze
Pokud má vektorový prostor dimenzi , tak v něm nalezneme soubor lineárně nezávislých vektorů. Přitom všechny vektory v daném vektorovém prostoru jsme schopní vyjádřit jako jistou lineární kombinaci těchto vektorů. Tyto proto nazýváme báze daného vektorového prostoru. Posledně jmenovaná vlastnost plyne z definice dimenze vektorového prostoru. Kdyby totiž existoval vektor, který by nešlo vyjádřit jako lineární kombinaci výše zmíněných vektorů, tak bychom obdrželi soubor vektorů, který je lineárně nezávislý. To je ale ve sporu s tím, že je dimenze prostoru rovna .

Vektorový podprostor
Jak již bylo řečeno výše, podprostor vektorového prostoru je taková jeho podmnožina, která je sama o sobě vektorovým prostorem.
Lineární obal
Jedná se o speciální případ podprostoru. Mějme vektorů a uvažujme všechny jejich možné lineární kombinace. Pak množinu všech těchto lineárních kombinací nazýváme lineárním obalem vektorů . Že se skutečně jedná o podprostor, není těžké dokázat.
Příklady vektorových prostorů
Uveďme si nyní příklady nejčastěji používaných vektorových prostorů. V numerické matematice nejčastěji používanými vektorovými prostory jsou ty konečnědimenzionální, které jsou navíc definované nad číselnými tělesy. Velkou výhodou prostorů konečné dimenze je to, že v nich lze snadno zavést bázi. Každý vektor tak lze popsat pomocí jeho souřadnic v této bázi. Souřadnice přitom tvoří n-tice čísel. Při studiu libovolného konečněrozměrného prostoru se tak stačí omezit na studium prostoru n-tic čísel, jehož vlastnosti si přiblížíme v následujícím oddíle. Z tohoto pohledu jsou co do struktury mnohem bohatší prostory s nekonečnou dimenzí, jako např. prostor spojitých funkcí či prostor posloupností, jejichž příklady zde také uvádíme. Další příklady vektorových prostorů lze nalézt i v oddíle Vektorové prostory s dodatečnou strukturou níže.
Aritmetické vektory
Mějme těleso a jisté přirozené číslo . Uvažujme dále kartézský součin , tj. prostor uspořádaných n-tic prvků z tělesa . Na tomto prostoru si definujme operaci sčítání a operaci násobení prvkem z tělesa následovně: Nechť a jsou dvě uspořádané -tice, jejich součet je pak definován jako





tedy jako jiná uspořádaná -tice, jejíž složky jsou rovny součtům složek dvou předešlých uspořádaných -tic. Nechť dále je prvek tělesa, násobek pak definujeme jako


Výsledkem je tedy opět uspořádaná -tice.
Množina všech uspořádaných -tic s tělesem a s výše definovanými operacemi sčítání a násobení je vektorový prostor (což lze snadno dokázat z definice vektorového prostoru výše). Nazýváme ho aritmetickým vektorovým prostorem dimenze nad tělesem (nebo -rozměrným aritmetickým vektorovým prostorem nad tělesem ). Jeho prvky pak nazýváme aritmetické vektory. Protože je tento typ vektorů používán velmi často, tak se obvykle přívlastek aritmetický vynechává a hovoří se pouze o vektorech. Občas se lze setkat i s frází: vektorový prostor s přirozeně definovanými aritmetickými operacemi či vektorový prostor s přirozeně definovanými operacemi sčítání a násobení. V takovém případě se myslí právě výše zavedený prostor, kde se dva vektory sčítají a násobí číslem po složkách. Můžeme totiž definovat i jiné operace sčítání a násobení číslem, při kterých by prostor uspořádaných -tic též tvořil vektorový prostor. Pak bychom mu už ale neříkali aritmetický vektorový prostor.

Prakticky vždy se za těleso bere množina reálných či komplexních čísel, dostáváme tedy prostory či . Prvky těchto prostorů se obvykle značí jako sloupce


kde udává počet složek. Takto zapisovaným -ticím říkáme sloupcové vektory. Lze se ale setkat i s vektory psanými do řádku

které nazýváme řádkové vektory. Pro práci se sloupcovými vektory viz Příklad 1 v článku Lineární kombinace, Příklad 1 v článku Lineární nezávislost či Příklad 1 a Příklad 2 v článku Lineární obal. Pokud pracujeme pouze se samotnými aritmetickými vektory, tak je jedno, zda používáme řádkový či sloupcový zápis. Rozdíl ale začne být patrný, budeme-li chtít těmito vektory násobit matici. Více viz články Sloupcový vektor a Řádkový vektor. Prostor uspořádaných n-tic má dimenzi rovnou n. Jednotlivé složky obecného n-složkového aritmetického vektoru jsou totiž navzájem nezávislé a k určení každého vektoru v daném vektorovém prostoru je tedy třeba právě n čísel.
Jak bylo ukázáno v Motivaci, prostor šipek v rovině odpovídá prostoru dvousložkových aritmetických vektorů. Přesněji řečeno, námi rozebíraný případ je případ aritmetického vektorového prostoru definovaného nad tělesem reálných čísel a s přirozeně zavedenými aritmetickými operacemi. Prostor šipek ve trojrozměrném prostoru by odpovídal množině . Analogicky pak prostor šipek v -rozměrném prostoru odpovídá množině nad tělesem s přirozeně definovanými operacemi sčítání a násobení.



Matice
V předchozím oddílu jsme zkoumali prostor uspořádaných n-tic čísel, tedy prvků množiny . Podívejme se nyní na lehce obecnější množinu , která vznikne jako kartézský součin n krát m množin, z nichž každá je rovna tělesu . Jedná se tedy prakticky o množinu uspořádaných -tic, kde . Oproti aritmetickým vektorům ale uděláme jednu věc navíc. Jednotlivé složky prvku z totiž seřadíme do obdélníku o rozměrech n krát m, jak je uvedeno níže




Takovýmto objektům se říká matice. Je obvyklé označovat matice velkými tučnými či konturovými písmeny, jak je vyznačeno výše. Mohli jsme ale stejně tak místo psát , jedná se pouze o značení. Máme tedy množinu , těleso . Zbývá nám tedy definovat operaci sčítání a operaci násobení. Obě definujeme stejně jako v případě aritmetických vektorů, tzn.


Tento způsob sčítání, resp. násobení, se označuje jako sčítání, resp. násobení po složkách. Jedná se o klasický způsob zavedení těchto operací, kterým tak občas říkáme "přirozeně definované aritmetické operace". S takto definovanými operacemi lze snadno ukázat, že množina s tělesem tvoří vektorový prostor. Opět se nejčastěji za bere množina reálných či komplexních čísel.
To, že jsme jednotlivé složky vektoru alias matice uspořádali do obdélníku ještě nic neznamená, stále s nimi totiž pracujeme jako s aritmetickými vektory. Rozdíl nastává teprve v tom, že pro matice můžeme definovat i jejich vzájemné násobení. Můžeme tedy násobit spolu dva vektory (matice), v obecném případě můžeme pouze vektor násobit prvkem z tělesa (číslem). Možnost násobit mezi sebou matice je ale mimo rámec definice vektorového prostoru a není pro jeho zavedení nutná. Čtenáře proto pro podrobnosti odkážeme na článek Matice. Analogicky jako v případě aritmetických vektorů by se ukázalo, že dimenze prostoru je .

Lineární operátory
Dosud jsme se zabývali vektorovými prostory . Uvažujme nyní zobrazení množiny na sebe. Jinými slovy, uvažujme zobrazení , které vezme vektor z a vrátí obecně nějaký jiný vektor z . Na vlastnosti tohoto zobrazení naklademe dvě podmínky:




První podmínku lze vyjádřit slovy "obraz součtu je součet obrazů" a matematicky se nazývá aditivita. Druhou podmínku pak můžeme popsat jako "obraz násobku je násobek obrazu" a matematicky se jí říká homogenita. Zobrazení splňujícímu výše uvedené podmínky se říká lineární operátor. Nechť je nyní vektorový prostor konečné dimenze, můžeme pro konkrétnost brát aritmetický vektorový prostor dimenze . Pak lineární operátor působící na tomto prostoru bere aritmetické vektory a vrací jiné aritmetické vektory, přičemž splňuje vlastnost

Uvažujme nějaké dva lineární operátory působící na . Podobně jako v případě běžných funkcí bychom i nyní chtěli tyto dva lineární operátory umět sečíst. Chtěli bychom si tedy zavést, co to přesně znamená, když operátor sečteme s operátorem . Jak by mnohého napadlo, definujeme si součet dvou lineárních operátorů následovně

kde je libovolný vektor z prostoru . Na levé straně poslední rovnosti vystupuje jediný lineární operátor, který jsme si označili jako a nazýváme ho součet lineárních operátorů a . Výrazem výše jsme tak definovali hodnotu tohoto lineárního operátoru pomocí hodnot operátorů a . Podobně si definujme i násobek lineárního operátoru prvkem z tělesa jako

kde opět je libovolný vektor z prostoru a na levé straně rovnosti vystupuje operátor, který jsme si označili jako . Jeho hodnotu pro každý vektor jsme pak definovali výrazem na pravé straně rovnosti. Znovu zdůrazněme, že nyní nesčítáme vektory a nenásobíme vektory z , ale samotné lineární operátory. Označme množinu všech lineárních operátorů působících na prostoru jako . O této množině lze ukázat, že spolu s tělesem a právě zavedenými operacemi sčítání a násobení tvoří vektorový prostor. Máme tedy vektorový prostor lineárních operátorů , z nichž každý působí na dalším vektorovém prostoru, prostoru (!) Lineární operátory jsou navíc jen speciálním případem obecnějšího druhu zobrazení, které nazýváme lineární zobrazení. Ta mají stejné vlastnosti jako lineární operátory až na to, že místo toho, aby vraceli své hodnoty do vektorového prostoru , tak je vrací do ještě dalšího vektorového prostoru, označme si ho . Lineární zobrazení je tedy zobrazení z vektorového prostoru do vektorového prostoru , které splňuje podmínku aditivity a homogenity (viz výše). I tato zobrazení můžeme sčítat a násobit prvkem z tělesa. Podobně jako pro lineární operátory by se i u těchto zobrazení dalo ukázat, že tvoří vektorový prostor. Jedná se o vektorový prostor zobrazení, která berou vektory z jednoho vektorového prostoru a vrací hodnoty do jiného vektorového prostoru .



Dimenze prostoru všech lineárních operátorů závisí na dimenzi vektorového prostoru , na kterém tyto operátory působí. Pokud je dimenze nekonečná, pak je nekonečná i dimenze prostoru . Pokud je dimenze prostoru konečná a rovná jistému přirozenému číslu , pak je dimenze prostoru taky konečná a je rovna . Máme-li totiž vektor z vektorového prostoru dimenze , tak jsme tento vektor schopni vyjádřit jako lineární kombinaci vektorů báze. Označme si tyto vektory báze jako , pak



kde jsou souřadnice vektoru ve zvolené bázi. Když zapůsobíme na lineárním operátorem , tak z definice vlastností tohoto operátoru plyne


kde jsme označili . Vektory ale zase leží ve , můžeme je tedy vyjádřit v bázi



pro každé . Celkově tak můžeme psát


Koeficienty popisují působení lineárního operátoru na vektory z . Těchto koeficientů je zjevně dohromady . Máme tedy čísel, pomocí nichž můžeme popsat libovolný operátor působící na a dimenze prostoru je tedy rovna tomuto číslu.

Posloupnosti
Jistým zobecněním aritmetických vektorů na nekonečnou dimenzi jsou posloupnosti prvků z tělesa. Místo uspořádaných n-tic nyní bereme posloupnosti, které mají složek nekonečně mnoho. Operace sčítání a násobení prvkem z tělesa můžeme zavést podobně jako pro aritmetické vektory. Podobně bychom i ověřili, že množina všech posloupností prvků daného tělesa tvoří vektorový prostor. Nulovým vektorem by byla posloupnost nul, opačný vektorem k dané posloupnosti by byla posloupnost opačných prvků atd. Více nás ale zajímají posloupnosti, které konvergují. Aby tyto posloupnosti vůbec tvořily vektorový prostor, tak ale nejprve musíme zjistit, zda součet konvergentních posloupností je opět konvergentní posloupnost a podobně pro násobek. Omezíme-li se nyní na těleso reálných čísel a využijeme vlastností limity

vidíme, že součet dvou konvergentních posloupností je konvergentní posloupnost a totéž platí i pro násobek konvergentní posloupnosti. Množina reálných konvergentních posloupností je tedy uzavřená na součet svých prvků a na násobení svých prvků číslem. Tato množina tvoří podprostor vektorového prostoru všech posloupností reálných čísel. Viz též Příklad 3 v článku Vektorový podprostor. Ač jsou kvůli konvergenci na prvky posloupnosti nakladena jistá omezení, má prostor konvergentních posloupností nekonečnou dimenzi. Jedná se tedy o nekonečnědimezionální podprostor prostoru všech posloupností.


Spojité funkce
Uvažujme nyní množinu všech spojitých reálných funkcí jedné reálné proměnné. K ní si vezměme těleso reálných čísel a definujme si operace sčítání dvou funkcí a násobení funkce číslem bodově: pro libovolné dvě funkce a číslo mějme


kde probíhá reálnou osu. V matematické analýze se dokazuje, že součet dvou spojitých funkcí je opět spojitá funkce. Podobně násobek spojité funkce je spojitá funkce. Množina všech spojitých reálných funkcí reálné proměnné je tedy uzavřená na sčítání funkcí a násobení funkcí číslem, což je nutný předpoklad k tomu, aby mohla být vektorovým prostorem. Ověřením axiomů vektorového prostoru se dá skutečně dokázat, že tato množina tvoří vektorový prostor. Tento prostor přitom představuje podprostor v prostoru všech reálných funkcí reálné proměnné, viz Příklad 2 v článku Vektorový podprostor. Lze též dokázat, že vektorový prostor uvažovaných spojitých funkcí je nekonečné dimenze.
Polynomy
V Motivaci jsme použili prostor všech polynomů (všech číselných polynomů jedné reálné proměnné), abychom se abstrakcí jeho vlastností dobrali pojmu vektorový prostor. Není těžké ověřit, že tato množina skutečně splňuje všechny axiomy vektorového prostoru, kde součet a násobek polynomů je definován stejně jako pro všechny ostatní spojité funkce, viz předchozí příklad. Dále, v oddíle Dimenze výše bylo naznačeno, že vektorový prostor všech polynomů je nekonečněrozměrný, značíme ho . Můžeme v něm ale najít jistou podmnožinu, která bude tvořit konečněrozměrný vektorový podprostor. Máme na mysli konkrétně množinu všech polynomů, jejichž stupeň je menší nebo roven jistému zadanému přirozenému číslu n. Je snadné si rozmyslet, že součtem polynomů, jejichž stupeň je menší než n opět dostanu polynom se stupněm nepřevyšujícím n. Podobně pro násobek polynomu číslem. Označme si množinu těchto polynomů jako . Do této množiny zahrnujeme i nulový polynom, jehož stupeň se obvykle nedefinuje. Protože je polynom stupně n popsán n+1 koeficienty (jeden koeficient u každé mocniny nezávisle proměnné plus absolutní člen, u něhož žádná mocnina není), je dimenze prostoru rovna n+1.


Vektorové prostory s dodatečnou strukturou
V praxi je velmi užitečné vybavit vektorový prostor dodatečnou strukturou. Příkladem může být např. zavedení pojmu délky, čímž se vektorový prostor stane navíc metrickým prostorem. Formálně se tento pojem zavádí jako jisté zobrazení z množiny vektorů do množiny kladných (reálných) čísel. Tomuto zobrazení se říká norma a musí splňovat jisté podmínky, viz níže oddíl Normované vektorové prostory. Dále můžeme zavést na vektorovém prostoru skalární součin, který nám mj. umožní měřit úhly mezi dvěma vektory, viz Prostory se skalárním součinem níže. Pokročilejším příkladem zavedení dodatečné struktury na vektorovém prostoru se pak zabývá oddíl Topologický vektorový prostor.
Normované vektorové prostory
Uvažujme v dalším vektorový prostor nad číselným tělesem . Jak bylo zmíněno v úvodu nadřazené sekce, je z různých důvodů velmi užitečné zavést ve vektorovém prostoru pojem délky. Matematicky je tento realizován pomocí pomocného zobrazení zvaného norma, které zobrazuje vektorový prostor do množiny nezáporných (reálných) čísel. Každému vektoru je tedy jednoznačně přiřazeno nezáporné číslo – jeho "délka". Je přitom přirozené požadovat, aby měl nulový vektor nulovou délku a žádný jiný vektor nulovou délku neměl. Neboli, nulovou délku má právě jen nulový vektor. Dále požadujeme, že prodloužíme-li daný vektor -krát, tak i jeho délka vzroste -krát (pro kladné, jinak bychom brali absolutní hodnotu ). Nakonec, protože je norma zobecněním pojmu absolutní hodnoty na reálných číslech, tak od ní požadujeme splnění trojúhelníkové nerovnosti. Že se jedná též o přirozený požadavek je názorně vidět z příkladu šipek v rovině, viz Motivace a obrázek Obr. 3., kde součet délek šipek a musí být alespoň tak velký jako délka šipky . Jinak bychom nemohli sestrojit trojúhelník o stranách , a . Přeformulujeme-li právě uvedené požadavky do matematické podoby, dostáváme matematickou definici normy:

Norma, značíme , je zobrazení vektorového prostoru (nad tělesem ) do nezáporných čísel, , splňující následující tři požadavky:





Zavedením normy na vektorovém prostoru se tento stává metrickým prostorem. Norma totiž vyhovuje definičním podmínkám metriky. Níže si uvedeme pár příkladů normovaných vektorových prostorů. Další příklady normovaných prostorů lze přitom nalézt v sekci Prostory se skalárním součinem, neboť skalární součin indukuje normu a každý prostor se skalárním součinem je tak automaticky i normovaným vektorovým prostorem.
Aritmetické prostory
Vraťme se nejprve k vektorovým prostorům aritmetických vektorů a ukažme, jak lze na těchto prostorech zavést normu. Uvažujme číselné těleso a aritmetický prostor , popř. , kde je pevně dané přirozené číslo (viz výše). Vektory jsou tedy uspořádané n-tice, . V definici normy nebyl nijak specifikován explicitní tvar tohoto zobrazení a možností, jak zvolit normu je tedy mnoho. V praxi se však často vymezuje jistá třída norem, kterým se občas říká p-normy. Jejich definice zní takto


kde , popř. označuje danou p-normu. Pro dostáváme klasickou Euklidovu normu vektoru. Dokázat první a druhou definiční vlastnost normy pro právě zavedená zobrazení je snadné. Pro důkaz trojúhelníkové nerovnosti lze pak použít Minkowského nerovnosti. Máme tak nyní vektorový prostor aritmetických vektorů, na němž je definován jednoparametrický systém norem. Pro práci s vektory a pro měření jejich délek si vždy zvolíme tu normu, s níž se nám v daném kontextu nejlépe pracuje.



Prostory matic
Výše jsme se zmínili, že matice mají velmi podobnou strukturu jako aritmetické vektory. Podobně jako na těchto vektorech bychom analogicky mohli zavést normu i na maticích obecných rozměrů. Na rozdíl od aritmetickým vektorů jsou však složky matic rozloženy do obdélníku, kterážto vlastnost umožňuje definovat násobek dvou matic. Obě matice přitom musí splňovat jednoduché požadavky na své rozměry. Násobit tedy nelze jakékoliv dvě matice. Pokud se ale omezíme jen na čtvercové matice (tj. ty mající stejný počet řádků a sloupců), tak toto omezení odpadá. Uvažujme nyní tedy prostor všech čtvercových matic řádu n a za těleso vezměme množinu reálných či komplexních čísel. Na tomto prostoru lze také zavést normu. V případě matic se ale kromě tří požadavků v definici normy požaduje ještě jedna vlastnost související s násobením matic. A sice

kde je buď množina reálných či komplexních čísel. Norma na prostoru matic je tedy zobrazení, které matici přiřadí nezáporné číslo a splňuje přitom čtyři požadavky zmíněné výše. Pokud bychom uvažovali prostor matic, které nejsou obdélníkové a které tedy nelze mezi sebou násobit, tak čtvrtý požadavek odpadá, protože nemá smysl. Norem na prostoru matic existuje nekonečně mnoho, v praxi se jich však používá jen pár. Příkladem je např. Euklidova norma, které se též říká Frobeniova norma či Hilbert-Schmidtova norma a která je pro libovolnou matici definována následovně


kde jsou prvky matice . Jak je vidno, Euklidova norma na prostoru matic je přímým zobecněním Euklidovy normy na prostorech aritmetických vektorů.

Prostory lineárních operátorů
Jak jsme si výše ukázali, lineární operátor definovaný na vektorovém prostoru dimenze lze popsat pomocí čísel (uvažujeme-li prostory nad číselnými tělesy). Tato čísla přitom můžeme uspořádat do čtvercové matice řádu , čímž dostáváme matici lineárního operátoru. Každému lineárnímu operátoru tak přísluší jistá matice. Na vektorový prostor lineárních operátorů se tedy můžeme dívat podobně jako na prostor matic a obdobným způsobem na něm zavést normu, viz předchozí příklad. Násobení matic pak odpovídá skládání lineárních operátorů.
Zaměřme se nyní na lineární operátory definované na normovaném vektorovém prostoru nekonečné dimenze. Tyto operátory už nelze popsat maticí. Ta by totiž musela mít nekonečně mnoho řádků a sloupců. Mezi všemi operátory však můžeme vymezit podmnožinu tvořenou spojitými operátory, kterým se běžně říká omezené operátory. Pro každý omezený operátor existuje kladné číslo takové, že pro libovolný vektor platí nerovnost


Obraz vektoru při zobrazení má tedy normu nejvýše -krát větší, než je norma původního vektoru . Zatím tedy uvažujeme, že je operátor definovaný na normovaném prostoru, do něhož spadají vektory . Chceme nyní definovat normu samotného lineárního zobrazení.
Z právě uvedené definice je lineární operátor omezený, pokud existuje alespoň jedno číslo s vlastností výše. Takových čísel ale může být více, může jich být dokonce nekonečně mnoho. Když budeme uvažovat infimum množiny všech těchto čísel, tak dostaneme opět číslo, které splňuje danou vlastnost. Toto číslo nazýváme norma omezeného lineárního operátoru . V symbolech

Ačkoli jsme právě zavedli objekt, jenž jsme pojmenovali norma, neověřili jsme dosud, že skutečně splňuje definiční podmínky normy. Je tedy potřeba dokázat, že právě zavedené zobrazení, které omezenému lineárnímu operátoru přiřazuje infimum jisté množiny, skutečně normou je. To není těžké nahlédnout, vyjdeme-li z vlastností normy na vektorovém prostoru . Dokonce je pak rovnou splněn i vztah analogický čtvrtému požadavku na normu v prostoru matic. Sice

kde jsou omezené lineární operátory a je jejich složení. Máme-li již dokázané vlastnosti normy, můžeme právě uvedenou nerovnost odvodit následovně


kde jsme v první rovnosti využili vlastností skládání zobrazení a pak po řadě definice normy pro operátor a . Jak vidíme, číslo je příkladem čísla z definice výše, když položíme . Protože norma operátoru je z definice infimum všech čísel , je nutně



což bylo dokázat.
Vektorový prostor omezených lineárních operátorů definovaných na nekonečněrozměrném normovaném vektorovém prostoru je tedy také nekonečněrozměrný normovaný vektorový prostor.
lp prostory
Výše jsme se zmínili o prostoru konvergentních posloupností. V této množině můžeme dále rozlišovat podmnožiny číselných posloupností, které konvergují "různě rychle". Matematicky je tento fakt zachycen v definici lp prostorů (l zde označuje malé písmeno L). Definice těchto prostorů umožňuje přímočaře zavést normu a jsou tak jedním z příkladů normovaných vektorových prostorů. Norma je přitom zavedena v analogii na -normy aritmetických vektorů, jak je naznačeno v předchozím příkladě. Konkrétně se pro dané definuje


Navíc se dodefinovává

kde označuje supremum všech prvků posloupnosti. O těchto množinách se dá díky Minkowského nerovnosti ukázat, že jsou uzavřené na součet dvou svých prvků. Součtem dvou řad z dané množiny dostaneme opět prvek dané množiny a má smysl hovořit o zavedení vektorového prostoru. Ověření axiomů vektorového prostoru je pak již rutinní záležitost. Normu lze v takovýchto prostorech definovat jako


K ověření, že takto definované zobrazení, které číselné posloupnosti přiřadí nezáporné číslo, splňuje trojúhelníkovou nerovnost přitom opět můžeme s úspěchem použít Minkowského nerovnosti. Dostali jsme tak rovnou jednoparametrický systém normovaných prostorů, pro každou konkrétní hodnotu parametru máme daný lp prostor s danou normou.

Lp prostory
Analogii, či spíše zobecnění, lp prostorů představují Lp prostory. Zde se oproti předchozímu příkladu neuvažují číselné posloupnosti, ale měřitelné funkce. V definičních podmínkách se pak místo sum objevují integrály. Konkrétně nechť je prostor s mírou, pak pro definujeme


Navíc se dodefinovává

kde označuje esenciální supremum funkce na množině . Analogicky jako v případě lp prostorů bychom pomocí integrální podoby Minkowského nerovnosti ověřili uzavřenost daných množin na součet dvou funkcí a platnost axiomů vektorového prostoru (kde uvažujeme klasické sčítání funkcí a jejich násobení číslem). Definice daných množin nás opět přímočaře vede na definici normy




Při ověřování trojúhelníkové nerovnosti bychom přitom opět využili integrální podoby Minkowského nerovnosti. Pro každé tak máme daný Lp prostor s danou normou.
Prostory se skalárním součinem
Dalším příkladem zobrazení, kterým můžeme dodatečně vybavit vektorový prostor, je skalární součin. Toto zobrazení nám umožňuje například zavést úhly mezi vektory či ortogonalitu. Shrňme si v krátkosti definici skalárního součinu na vektorovém prostoru (nad číselným tělesem ) následovně:
Skalární součin, značíme , je zobrazení , které každé dvojici vektorů přiřadí (obecně komplexní) číslo a splňuje následující čtyři podmínky:






kde pruh nad číslem označuje jeho komplexní sdružení. Jinými slovy, skalární součin je pozitivní nedegenerovaná sesquilineární forma.
O dvou vektorech pak říkáme, že jsou na sebe kolmé, resp. že jsou ortogonální, právě když jejich skalární součin je nula, tj. . Máme-li navíc zadaný skalární součin, tak jsme s jeho pomocí schopni zavést i normu. Norma se pomocí skalárního součinu přitom zavádí kanonicky následovně: máme-li skalární součin, tak můžeme definovat zobrazení tak, že



pro každý vektor . První požadavek v definici skalárního součinu nám přitom zajišťuje, že se pod odmocninou objeví jen nezáporná čísla a odmocnina tak má vždy v reálných číslech smysl. Ověřme nyní, že právě zavedené zobrazení je skutečně norma. První a druhý požadavek, jak jsou uvedeny v oddíle Normované vektorové prostory, je snadné dokázat. Zaměřme se na požadavek třetí, tedy trojúhelníkovou nerovnost. Využijeme-li vlastností skalárního součinu, obdržíme

kde označuje reálnou část čísla . Tuto můžeme seshora odhadnout absolutní hodnotou téhož čísla, tj. . Absolutní hodnotu skalárního součinu můžeme navíc díky Schwarzově nerovnosti odhadnout jako . Celkově tedy dostáváme výraz





jenž jsme měli dokázat. Zobrazení definované pomocí skalárního součinu způsobem výše je tedy skutečně norma. Jak vidno, každý prostor se skalárním součinem je současně i normovaným prostorem. Naopak to však platit nemusí. Níže si nicméně uvedeme příklady těch normovaných prostorů, na kterých se navíc dá zavést i skalární součin.
Eukleidův prostor
Vraťme se opět k našemu oblíbenému vektorovému prostoru aritmetických vektorů definovanému nad číselným tělesem. Pro konkrétnost uvažujme prostor nad tělesem . Podobně jako v případě normy, tak i v případě skalárního součinu je více možností jak toto zobrazení zavést. My se zde zmíníme o nejčastěji užívaném součinu, standardním skalárním součinu. Ten je dán vztahem

kde a jsou libovolné dva vektory z . Pruh nad složkou vektoru označuje komplexní sdružení daného čísla. Nejprve musíme ověřit, že toto zobrazení, které dvěma vektorům přiřadí obecně komplexní číslo, skutečně splňuje axiomy skalárního součinu a své jméno si tedy zaslouží. Ověření všech náležitostí je ale snadné, máme tak aritmetický vektorový prostor vybavený standardním skalárním součinem. Zaveďme nyní s pomocí tohoto skalárního součinu normu na prostoru postupem zmíněným v úvodu nadřazené sekce. Pro libovolný vektor tedy dostáváme

Jak vidíme, tato norma je rovna Euklidově normě definované v oddíle Aritmetické prostory. Standardní skalární součin tedy indukuje Euklidovu normu . Pokud místo komplexních čísel uvažujeme všude reálná čísla, tj. vektorový prostor nad tělesem , tak se nám standardní skalární součin redukuje do tvaru


kde a jsou libovolné dva vektory z . I tento skalární součin samozřejmě indukuje Euklidovu normu, tentokrát na prostoru . Vektorovému prostoru nad tělesem s výše definovaným skalárním součinem a odpovídající normou se říká Eukleidův prostor dimenze .
l2 prostor
Uvažujme nyní l2 prostor, tj. lp prostor definovaný výše, kde položíme p = 2. Tento prostor tvoří konvergentní posloupnosti komplexních čísel, pro které platí


Protože jsou posloupnosti jistým zobecněním aritmetických vektorů, zaveďme v analogii s předchozím příkladem zobrazení

kde a jsou libovolné dvě posloupnosti z prostoru l2. O tomto zobrazení bychom chtěli opět ukázat, že se jedná o skalární součin. Jednotlivé vlastnosti skalárního součinu bychom ověřovali podobně jako u aritmetických vektorů, zde ale navíc ještě potřebujeme vědět, zda řada, vystupující v definici zobrazení výše, má konečný součet. V této souvislosti lze užít Hölderovy nerovnosti ve tvaru


- .

Protože vybíráme posloupnosti s prostoru l2, tak jsou řady na pravé straně nerovnosti konečné a číslo na pravé straně je tedy konečné. Z toho plyne, že je konečná i řada na levé straně. Pro tuto řadu ale zjevně platí

Máme tak ověřeno, že zobrazení výše je skalární součin, který každé dvojici posloupností z prostoru l2 přiřazuje (konečné) číslo. Obdobně jako v předchozím příkladu bychom i nyní ověřili, že tento skalární součin definuje normu, která je totožná s normou definovanou v oddíle lp prostory, když položíme p=2.
L2 prostor
Přejděme nyní od lp prostorů číselných posloupností k Lp prostorům měřitelných funkcí. Uvažujme konkrétně L2 prostor. Tedy množinu měřitelných funkcí definovaných na prostoru s mírou , které splňují vztah

I na tomto prostoru chceme zavést skalární součin. Vyjdeme-li z výrazu pro skalární součin posloupností v předchozím příkladu, kde sumu zaměníme za integrál, tak obdržíme definiční vztah

kde jsou libovolné (komplexní) funkce z L2. Analogicky jako pro posloupnosti bychom i zde ověřili, že zadaný vztah definuje skalární součin, opět bychom pro ověřování trojúhelníkové nerovnosti využili Hölderovy nerovnosti, tentokrát v integrálním tvaru. A podobně jako v případě posloupností bychom i nyní ukázali, že takto definovaný skalární součin indukuje normu, která je totožná s normou objevující se v oddíle Lp prostory, když položíme p=2. Vektorovému prostoru L2 vybavenému skalárním součinem definovaným výše se říká prostor kvadraticky integrabilních funkcí. Tento prostor hraje zvlášť důležitou roli v kvantové mechanice. Zhruba řečeno, všechny vlnové funkce popisující stav kvantového systému totiž musejí v souladu s Bornovým postulátem patřit do tohoto prostoru.
Topologický vektorový prostor
Dosud jsme si uváděli příklady vektorových prostorů, k nimž byla dodatečná struktura dodána pomocí jistých zobrazení, která vektorům přiřazovala čísla. Na vektorový prostor však můžeme nahlížet i z topologického hlediska. Můžeme ho totiž současně chápat jako topologický prostor s jistou topologií. Zajímavý je pak příklad, kdy je topologie vektorového prostoru spojena s jeho lineární strukturou. Tímto spojením máme na mysli situaci, při níž jsou operace sčítání vektorů a násobení vektoru prvkem z tělesa v dané topologii spojitými zobrazeními. Dospíváme tak k objektu nazvanému topologický vektorový prostor, jehož matematickou definici uvádíme v následujícím.
Vektorový prostor nad tělesem vybavený topologií tvoří topologický vektorový prostor, právě když jsou splněny tři podmínky:

- Sčítání vektorů , chápané jako zobrazení topologických prostorů , je spojité zobrazení.
- Násobení prvkem z tělesa , chápané jako zobrazení topologických prostorů , je spojité zobrazení.
- Prostor je Hausdorffův.



Předpokládáme přitom, že na tělese je též zavedena jistá topologie. Topologie v první podmínce představuje součinovou topologii na kartézském součinu , topologie ve druhé podmínce pak součinovou topologii na kartézském součinu . Poslední požadavek pak nakládá omezení na vzhled topologie vektorového prostoru . Sice, že pro každé dva vektory existují jejich okolí, která jsou navzájem disjunktní. Ne každý vektorový prostor, na němž je definována topologie, tedy musí být nutně topologickým vektorovým prostorem.




Topologický vektorový prostor aritmetických vektorů
Jednoduchým příkladem topologického vektorového prostoru je prostor aritmetických vektorů , kde za topologii vezmeme topologii indukovanou euklidovskou normou. Jinými slovy, okolími daného vektoru jsou koule o jistém poloměru mající svůj střed v tomto vektoru. Tedy například (otevřená) koule o (kladném) poloměru se středem ve vektoru má množinový tvar




Topologii pak sestrojíme jako sjednocení všech možných koulí, tj. koulí o všech možných (nenulových) poloměrech se středy ve všech možných vektorech prostoru . K nim ještě musíme do topologie přihodit všechny možné průniky konečně mnoha libovolných koulí, prázdnou množinu a celou množinu . Za těleso bereme reálnou osu , jehož topologii sestrojíme analogicky případu výše, kde položíme . V takovém případě se nám otevřená koule redukuje na otevřený interval


Součinová topologie pro kartézský součin je pak tvořena kartézskými součiny koulí z prostorů a , jejich konečnými průniky a libovolnými sjednoceními, kde navíc vezmeme ještě prázdnou množinu a celou množinu . Podobně pro topologii na kartézském součinu .

Ukažme nejprve spojitost součtu dvou aritmetických vektorů v námi zavedené topologii. Naším úkolem je ověřit, že pro kterékoliv dva vektory a a kterýkoli kladný poloměr leží vektor tvaru v okolí , kde a pro jisté poloměry a . Neboli chceme, aby platilo . Pokud pro každé najdeme odpovídající a tak, aby byla splněna tato podmínka, tak můžeme uzavřít, že sčítání vektorů je spojité, neboť pro každé okolí součtu jsme našli odpovídající okolí v součinové topologii množiny , které vystupuje v definici spojitosti. Za tím účelem však stačí položit , abychom měli












Odhadli jsme tedy patřičnou normu jak jsme měli a ověřili jsme tak spojitost sčítání vektorů.
Podobně nyní ověřme spojitost násobení vektoru číslem. Chceme ukázat, že pro každý násobek čísla a vektoru a pro každé jeho okolí najdeme okolí čísla a okolí vektoru tak, že ať vynásobím libovolné číslo z okolí s libovolným vektorem z okolí , tak dostanu opět vektor, který leží v okolí . Jinými slovy, mějme kouli se středem v a poloměrem . Chceme najít poloměr koule se středem v a poloměr koule se středem v tak, aby libovolný vektor tvaru ležel v množině , kde a . S použitím vlastností normy můžeme odhadnout seshora výraz následovně












kde jsme ve druhé nerovnosti využili definic příslušných okolí, jak jsou specifikována výše. Diskutujme nyní dva případy. Za prvé, když platí , kde je poloměr okolí . V takovém případě stačí položit a , abychom obdrželi




Ukázali jsme tedy, že pokud , tak jsme našli poloměry okolí a tak, že vyhovují definici spojitosti násobení vektoru číslem. Podívejme se nyní na případ, kdy . Tehdy můžeme položit


kde je poloměr okolí . Dostáváme tak

Protože řešíme případ pro , můžeme první člen v závorce odhadnou seshora jedničkou, abychom dostali výraz

V případě jsme tedy též našli poloměry daných okolí tak, že je splněna podmínka spojitosti. Ověřili jsme tak platnost druhé definiční podmínky topologického vektorového prostoru.

Prostor je zajisté Hausdorffův, protože pro každé dva vektory jsme schopni zjistit jejich vzdálenost pomocí Euklidovy normy, označme si ji . Když pak vezmu kouli o poloměru a kouli o témže poloměru, tak tyto dvě koule tvoří okolí vektoru a vektoru a jsou přitom disjunktní. Je tedy splněn i třetí požadavek a můžeme uzavřít, že prostor nad tělesem s přirozeně zavedenou topologií je topologickým vektorovým prostorem.




Vektorové prostory nad konečným tělesem
Zdaleka nejčastěji používanými vektorovými prostory jsou ty definované nad tělesem reálných či komplexních čísel. Lze však uvažovat i jiná než tato tělesa, která ani nemusí mít nekonečnou mohutnost. Zvláštním případem vektorového prostoru je vektorový prostor definovaný nad konečným tělesem.
Konečná tělesa jsou často využívána např. v informatice v teorii kódování (lineární kódy). V tomto oboru se nejčastěji (pokud ne pouze) využívá tělesa Z2.
Aplikace
Použití ve fyzice
Již před zavedením pojmu vektorového prostoru se objevil koncept vektoru ve fyzice, kde se s jeho pomocí popisuje působení sil, momentů sil a dalších veličin, pro jejichž určení je důležitá nejen jejich velikost, ale i směr působení. Vektor samotný pak obvykle vyjadřujeme jako šipku, jejíž směr udává směr působení a její délka velikost působící veličiny. Více se o tomto tématu zmiňuje článek Vektor.
Jistým zobecněním vektoru je pojem tenzoru. Ten lze vyjádřit pomocí dvourozměrného lineárního objektu – matice. Příkladem může být např. tenzor momentu setrvačnosti, tenzor elektromagnetického pole atd. S tenzory se lze setkat kromě mechaniky např. i v obecné teorii relativity.
S dalším příkladem využití vektorového prostoru se můžeme hojně setkat v kvantové mechanice, kde se s jeho pomocí popisuje stav částice či jiného fyzikálního systému. V této souvislosti velkého významu nabývají tzv. Lp prostory integrabilních funkcí. Fyzikální stav systému lze popsat jako komplexní funkci, kterou lze opět chápat jako vektor. Fyzikální veličiny jsou pak v souladu s axiomy kvantové mechaniky vyjádřeny jako lineární operátory působící na těchto vektorech.
Značná obliba lineárních objektů ve fyzice vyvěrá z faktu, že k popisu přírodních procesů se dosti často používají rovnice, které jsou obtížně řešitelné. Pokud se namísto s přesným analytickým řešením spokojíme s alespoň přibližným řešením (často nám kvůli obtížnosti úlohy ani nic jiného nezbývá), tak nejjednodušším možným způsobem je předpokládat, že řešením je lineární objekt. Ten dosadíme do rovnice popisující přírodní proces a snažíme se najít takový tvar lineárního objektu, aby byla vzniklá odchylka od přesného řešení minimální. Tato metoda nalezení přibližného řešení funguje překvapivě často. Lineární objekty mají tu výhodu, že se s nimi snadno pracuje a je pro ně vybudována rozsáhlá matematická teorie. V kvantové mechanice se dokonce lineární struktura fyzikálního světa rovnou předpokládá a je ukotvena v axiomech kvantové mechaniky.
Použití v matematice
Kromě fyziky zaujímá pojem vektorového prostoru či obecněji lineární algebry jako celku nezastupitelné místo třeba v oblasti numerické matematiky či informatiky. Lineární algebra poskytuje rámec, ve kterém je možno různé výpočetní problémy formulovat elegantním a přehledným způsobem. Zejména teorie matic nalézá v numerické matematice široké uplatnění. Koncept vektorového prostoru je možno nalézt i v teoretičtějších partiích matematiky. Příkladem za všechny může být tečný prostor zavedený na fibrovaném prostoru, což je struktura studovaná odvětvím diferenciální geometrie.
Odkazy
Reference
- BALKOVÁ, Ľubomíra. Lineární algebra 1. Praha: Česká technika - nakladatelství ČVUT, 2013. ISBN 978-80-01-05346-1. – skripta FJFI ČVUT
Související články
Externí odkazy
 Obrázky, zvuky či videa k tématu vektorový prostor na Wikimedia Commons
Obrázky, zvuky či videa k tématu vektorový prostor na Wikimedia Commons - Vektorový prostor v encyklopedii MathWorld (anglicky)
Literatura
- PYTLÍČEK, Jiří. Lineární algebra a geometrie. Praha: Česká technika - nakladatelství ČVUT, 2008. ISBN 978-80-01-04063-8. – skripta FJFI ČVUT
- BALKOVÁ, Ľubomíra. Lineární algebra 1. Praha: Česká technika - nakladatelství ČVUT, 2013. ISBN 978-80-01-05346-1. – skripta FJFI ČVUT
- BLANK, Jiří; EXNER, Pavel; HAVLÍČEK, Miloslav. Lineární operátory v kvantové fyzice. Praha: Karolinum, 1993. ISBN 80-7066-586-6.