Vektorový součin
Vektorový součin je v matematice binární operace vektorů v trojrozměrném vektorovém prostoru. Výsledkem této operace je vektor (na rozdíl od součinu skalárního, jehož výsledkem je při součinu dvou vektorů skalár). Výsledný vektor je kolmý k oběma původním vektorům.
Značení
Vektorový součin vektorů a, b se obvykle značí jedním z následujících způsobů:
- - používáno ve frankofonních zemích
- - používáno v Rusku




Definice
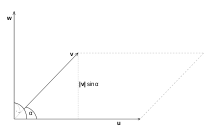
Vektorový součin vektorů a a b je definován jako vektor kolmý k vektorům a a b s velikostí rovnou obsahu rovnoběžníka, který oba vektory určují:

kde α je úhel svíraný vektory a a b (0° ≤ α ≤ 180°) a n je jednotkový vektor k nim kolmý. Takové jednotkové vektory však existují dva; volba závisí na tom, je-li souřadný systém definován jako pravotočivý nebo levotočivý. V pravotočivém souřadném systému lze použít pravidlo pravé ruky: je-li vektor a znázorněn ukazovákem a vektor b prostředníkem pravé ruky, přičemž ukazovák je natažený v rovině dlaně a prostředník směřuje blíže k rovině na dlaň kolmé, pak vektorový součin a×b je ve směru palce.
Vektorový součin lze definovat také bez pomoci úhlu, který oba vektory svírají. Máme-li vektorový součin c = a×b, pak složky vektoru c lze určit jako



Pomocí Levi-Civitova symbolu je možné složky vektorového součinu zapsat jako

S využitím vzájemně jednoznačného přiřazení třísložkových vektorů a antisymetrických matic


lze vektorový součin zavést jako komutátor dvou takových matic

Množina antisymetrických matic je vzhledem ke komutátoru uzavřená.
Zobecnění při zachování bilinearity
Vektorový součin dvou vektorů není pravý vektor, ale tzv. pseudovektor, tzn. při zrcadlení vztažné soustavy se transformuje s opačným znaménkem než pravé vektory. Chceme-li s vektorovým součinem operovat kovariantně, vyjádříme jeho složky jako prvky antisymetrického tenzoru druhého řádu

Počet nezávislých složek takovéhoto antisymetrického tenzoru je roven třem pouze ve třírozměrném prostoru, proto lze provést přiřazení




Toto přiřazení je speciálním případem tzv. Hodgeova duálu a umožňuje zobecnění vektorového součinu i do prostorů s dimenzí různou od 3. (Např. ve čtyřrozměrném prostoru je počet nezávislých složek antisymetrického tenzoru druhého řádu 6, takže jej již nelze vyjádřit jako pseudovektor a zobecněním vektorového součinu je pseudotenzor druhého řádu.)
Přímočaré zobecnění, není-li požadována binárnost
Víme, že ve 3D se vektorový součin chová tak, že výsledkem je vektor kolmý na oba argumenty součinu a jeho velikost je rovna obsahu rovnoběžníku utvořeného z argumentů. Vstupní vektory a výsledek (v tomto pořadí) tvoří přitom pravotočivou bázi.
Tato definice nabízí přímočaré a mnohdy pro svou užitečnost používané zobecnění. V nD prostoru bude tedy vektorový součin vracet vektor kolmý na zadaných (n-1) vektorů. Jeho velikost bude rovna objemu (n-1) rozměrného rovnoběžnostěnu z těchto vektorů utvořeného. Orientaci zvolíme tak, aby posloupnost n vektorů, kde prvních (n-1) odpovídá zadaným argumentům a n-tý je výsledek, tvořila pravotočivou bázi.
Lze ukázat, že výsledný vektor je pak dán takto:

Kde symbolem značíme zobecněný vektorový součin, dolní index označuje pořadové číslo vektoru a horní čísluje jeho složky. Je zřejmé, že pro n=2 přejde vzorec ve známý vztah z 3D.

Ve složkách lze výsledný vektor zapsat dle pravidla o rozvoji determinantu takto
- ,

kde bylo použito označení pro determinant matice utvořený s n vektorů, ve který má každý vektor vynechánu i-tou složku.

Podobně lze výsledek zapsat pomocí Levi-Civitova symbolu , který nabývá hodnot 1,-1,0 podle toho jestli je posloupnost indexů, které obsahuje sudá, lichá, nebo je v posloupnosti nějaký index dvakrát. Máme tedy

- ,

kde označuje i-tou složku zobecněného vektorového součinu. Je užitečné si všimnout, že index i se v symbolu vyskytuje na konci, nikoliv na začátku, jak se píše ve 3D, kde na tom nezáleží, na rozdíl od sudých dimenzí.


Z pravidla pro rozvoj determinantu je okamžitě vidět kolmost výsledku ke všem vektorům v součinu.
Poznamenejme, že tento vektorový součin mění znaménko při libovolné záměně vektorů (stejně jako ve 3D) a představuje multilineární operátor (lineární v každém svém argumentu).
Vlastnosti
- Vektorový součin je homogenní , vynásobením vektorového součinu číslem a dostaneme

- Vektorový součin je také (oboustranně) distributivní vůči sčítání,

takže se jedná o bilineární operaci.
- Vektorový součin je antikomutativní, tzn.

- Vektorový součin vektorů u, v je nulový (u×v = o), právě když jsou rovnoběžné (lineárně závislé).
- Vektorový součin není asociativní (platí pro něj Jacobiho rovnost).
- Pro derivaci vektorového součinu v třírozměrném prostoru platí:

- Tvoří-li vektory i, j, k (v tomto pořadí) pravotočivou ortonormální bázi třírozměrného prostoru, pak



- V uvedené bázi lze vektorový součin vektorů u, v zapsat pomocí determinantu jako

Příklady výpočtu
- Součin vektorů u = (1,2,0) a v = (0,1,2) se vypočítá následovně:
- Je zřejmé, že vektory u×v a v×u jsou navzájem opačné vektory. Oba jsou kolmé na rovinu určenou vektory u, v.



- Výpočet pomocí determinantu matice:

- Pro výpočet determinantu matice řádu 3 lze použít například Sarrusovo pravidlo, podle nějž je výsledek

- i, j, k jsou jednotkové vektory rovnoběžné s jednotlivými souřadnými osami, tedy i = (1,0,0), j = (0,1,0), k = (0,0,1).
- Proto .

- Výpočet v×u je analogický.
Použití
Vektorový součin je hojně využíván ve fyzice, např. moment síly M je definován následovně:
- ,

kde r je polohový vektor působiště síly.
Související články
- Vektor
- Tenzor
- Dvojitý vektorový součin
- Smíšený součin
- Skalární součin
- Komutátor
- Operátor rotace