Navigace
Navigace je postup a činnost, jimiž lze kdekoliv na zeměkouli stanovit svou polohu a nalézt cestu ke stanovenému cíli, která je podle zvolených kritérií nejvhodnější (například nejrychlejší, nejkratší atd.).
Etymologie
Termín je odvozen z latinského navigare (plavit se na lodi), jehož význam se metonymicky přenesl na zjišťování polohy a směru a na volbu trasy a metaforicky rozšířil na další druhy dopravy a další činnosti.
Historie navigování

Dějiny navigace souvisí s migrací lidí a objevováním nových zemí pomocí mořeplavby. Některé národy se zabývaly objevováním v takové míře, že tím vstoupily do dějin. Patří mezi ně Féničané, staří Řekové, Arabové, Peršané, Vikingové, Malajci, Polynésané, Mikronésané.
Navigaci na pevnině nebo v její blízkosti je možná pomocí orientačních bodů, které byly i uměle vytvářeny, například majáky. Tato možnost není na volném moři, proto je rozvoj navigace (původní význam lodivodství) spojena právě s mořeplavbou.
Základním způsobem navigace na moři byla astronavigace, tedy orientace na základě pozorování nebeských těles jako je Slunce, Měsíc a hvězdy. K přesnějšímu určení jejich polohy se už od starověku používal astroláb, přístroj na principu měření úhlů. Vylepšeným přístrojem pro zaměřování těles byl od 18. století používaný sextant. Využití sextantu, přesného data a času a tabulek s vypočtenými polohami nebeských těles byly základní pomůcky pro určení zeměpisné polohy až do 20. století.
Vedle astronavigace byla další základní navigační pomůcka kompas. Jeho použití je doloženo v Číně nejpozději ve 4. století, ve Středomoří se poprvé objevuje ve 12. století. Kompas umožňuje sledování kurzu (zvoleného směru plavby) a přibližné určení světových stran dle magnetických siločar Země a jejich přesné určení se znalostí magnetické deklinace pro danou zeměpisnou polohu. Na odlišném principu funguje od počátku 20. století používaný gyrokompas, který k určení severu používá setrvačník a působení zemské gravitace a rotace.
Navigace pomocí sextantu a kompasu bylo doplněno či nahrazeno díky technickému vývoji novými systémy ve 20. století. Zejména v letecké dopravě se začalo používat navigování pomocí rádia a radaru. V důsledku rozvoje kosmonautiky a umělých družic se v druhé polovině století začalo používat navigace z oběžné dráhy Země. Globální družicové polohové systémy původně určené pro vojenské účely umožňují pomocí přijímače signálů z družic určení polohy přijímače. Od počátku 21. století, kdy byl v roce 2000 uvolněn americký systém GPS, je možné široké využití těchto systémů v civilním sektoru.
Jakubova hůl
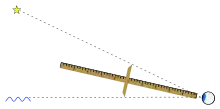
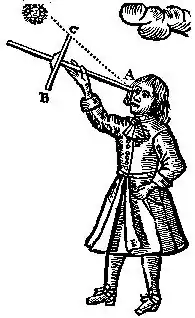
Jakubova hůl nebo Jákobova hůl je jednoduchý přístroj pro měření úhlů a historická navigační a astronomická pomůcka, která funguje na principu podobnosti trojúhelníků. Sestává z tyče se stupnicí a kolmým posuvným břevnem.
Při měření se přiloží konec tyče k oku a přístroj se nastaví tak, aby oba měřené body byly na koncích posouvaného břevna. Změřený úhel se odečte na stupnici a je dán polohou posuvného břevna v okamžiku změření. Jakubova hůl je použitelná pro měření úhlové výšky nebeských těles nad obzorem, například při astronavigaci, ovšem Slunce je pro přímé pozorování příliš jasné.
Jakubovu hůl popsal snad již v 11. století čínský polyhistor Šen Kua, v Evropě ve 14. století židovský matematik Levi ben Geršom. Ke stejnému účelu byl již od starověku používán složitější astroláb, od 18. století se rozšířil přesnější sextant.
Astroláb

Astroláb je historický astronomický přístroj, který dříve astronomové, astrologové, navigátoři a další používali na určování a předpovídání poloh hvězd a Slunce, určování místního času podle místní zeměpisné délky a naopak, k zeměměřickým účelům a pro triangulaci. Astroláb lze považovat za ploché účelové zjednodušení armilární sféry. Ačkoliv je známo, že astroláb je velmi starý přístroj, jeho původ není zcela zřejmý. Někteří historici jeho vynález připisují astronomu Apollóniu z Pergy či Hipparchovi žijícímu v polovině 2. století př. n. l., jiní Hypatii z Alexandrie žijící na přelomu čtvrtého a pátého století. K dokonalosti tento přístroj dovedli až Arabové.
Typický astronomický astroláb sestává z mosazného disku zvaného mater (matka), který je opatřen otočnými prvky. Jedna strana tvoří pohyblivou mapu oblohy, druhá slouží k měření úhlové výšky nebeských těles.
Mapa oblohy obsahuje stereografickou projekci nebeské sféry, která je tvořena křivkami sledujícími úhlovou výšku těles v závislosti na azimutu. Tato projekce je závislá na zeměpisné šířce, proto bývá vyryta do výměnného disku. Nad touto vrstvou je otočné rete (síť), na kterém jsou vyznačeny polohy ekliptiky se zvěrokruhem a vybraných nejjasnějších hvězd. Po obvodu mater je stupnice v úhlech a (nebo) hodinách. Otočením rete na aktuální hodinu je možné zobrazit aktuální polohu zobrazených hvězd nebo naopak dle polohy hvězd určit čas. Nad rete bývá někdy ještě otočné pravítko pro přesnější zaměření těles.
Na zadní části astrolábu je umístěna alhidáda, otočné pravítko s průzory. Astroláb se umístí do svislé polohy pomocí závěsného kroužku a průzorem se zaměří nebeské těleso. Na stupnici se pak odečte naměřená úhlový výška. Na této straně také bývají různé další stupnice pro další výpočty a převody, například pro zjištění polohy Slunce na ekliptice.
Konkrétní podoba astrolábu však závisí na zvoleném účelu použití a potřebách a znalostech jejich konstruktérů. Námořní astroláb má tvar kruhové desky dělené na stupně s otočným ramenem a průzory. Používal se k měření výšky hvězd při astronavigaci. Později byl nahrazen sextantem.
Sextant

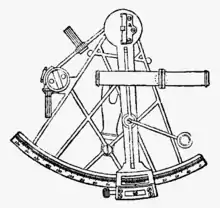
Sextant je přenosný přístroj pro měření úhlové vzdálenosti dvou těles nebo úhlu výšky nebeských těles nad horizontem. Od 18. do první poloviny 20. století byl nejpoužívanějším přístrojem pro určení zeměpisné polohy při navigaci. Název sextant pochází z doby, kdy sextanty byly konstruovány jako šestina kruhu. V současnosti ale sextantem nazýváme všechny měřící přístroje založené na stejném principu, bez ohledu na to, jak velkou část kruhu jejich rám (resp. stupnice) vytíná[1]. Využívá otočného zrcadla a překrytí odrazu pozorovaného tělesa (např. hvězdy) s obrazem horizontu v druhém, polopropustném zrcadle.
Při použití se sextant nastaví do polohy, aby byl přímým průhledem skrz polopropustné zrcadlo vidět horizont. V ose otáčení je umístěno otočné zrcátko, které je spojeno s ukazatelem na úhlové stupnici. Se zrcátkem se pootáčí až do polohy, kdy se obraz zaměřovaného tělesa promítne na polopropustné zrcadlo a překryje se se současně pozorovaným horizontem. Na stupnici se pak odečte úhel odpovídající výšce tělesa nad horizontem.
Protože úhel dopadu a odrazu se sčítají (zrcátko pod úhlem odrazí paprsek v úhlu ), úhel otočení zrcátka vůči polopropustnému zrcadlu odpovídá výšce nad obzorem . Stupnice mívá maximální označenou hodnotu 120°, takže přístroj má tvar kruhové výseče s úhlem , tj. šestiny plného kruhu – odtud název sextant.





Pro přesnější zaměření je sextant vybaven malým dalekohledem a různými barevnými výklopnými filtry, které také ochraňují zrak při zaměřování slunce.
Navigace pomocí sextantu je metoda náročná na pomůcky a zkušenost navigátora. V principu se jedná o výpočet rozdílu polohy vypočtené astronomické polohy slunce na místě předpokládané polohy a určení korekce polohy k místu skutečného měření. Kromě znalosti poměrně komplikovaného výpočtu obsahujícího několik konstant (datum slunovratu, deklinace slunovratu, korekce na použité časové pásmo) je pro dosažení v praxi využitelné přesnosti nutné znát hodnoty korekcí z Almanachu. Námořní tabulky, "Nautical Almanach", vydává US Nautical Almanach Office spolu s britským Her Majesty Nautical Almanach Office pro každý rok.

Podrobnější princip Sextantu
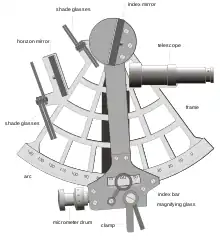
Princip sextantu ukazuje obrázek 1. Základní částí sextantu je rám, tvořící kruhovou výseč, se stupnicí na jeho obvodu. Na rámu jsou připevněny zrcátko Z2 (horizontové zrcátko, horizon mirror), jehož rovina je kolmá k rovině rámu, a dalekohled (případně pouze průzor). Zrcátko Z2 sahá pouze do takové vzdálenosti od rámu, aby zabíralo cca polovinu zorného pole dalekohledu. (U většiny typů sextantů je zrcátko Z2 tvořeno skleněnou destičkou, která zabírá celé zorné pole, a pouze její pravá polovina je pokovena odraznou vrstvou.) Nahoře, ve středu kružnice tvořící dolní okraj rámu, je umístěn čep, okolo nějž se otáčí otočné rameno – alhidáda. Spolu s alhidádou se okolo tohoto čepu otáčí i otočné zrcátko Z1 (indexové zrcátko, index mirror).
Paprsek jdoucí od objektu I (zpravidla horizontu) prochází nalevo od zrcátka Z2 přímo do dalekohledu. Paprsek jdoucí od objektu II (Slunce, hvězdy, ...) se odráží od zrcátka Z1 a poté od zrcátka Z2 a dopadá rovněž do dalekohledu. Při pohledu do dalekohledu sextantu uvidíme zorné pole svisle rozdělené na dvě poloviny. V levé polovině vidíme přímý obraz objektu I (horizontu), v pravé polovině vidíme odraz jiné části scény. Sextant ukazuje úhlovou vzdálenost obou objektů v okamžiku, kdy se nám podaří otáčením alhidády oba dostat do koincidence (na jednu úroveň), viz obr. 1 vpravo.
Geometrie odrazu od zrcátek způsobuje, že úhel natočení alhidády (tj. úhel, který svírají vůči sobě roviny zrcátek Z1 a Z2) je roven polovině úhlové vzdálenosti objektů I a II. Stupnice sextantu je ale konstruována tak, že na ní čteme přímo úhlovou vzdálenost objektů . Vytíná-li tedy rám a stupnice sextantu šestinu kruhu (tj. ), lze sextantem měřit úhlové vzdálenosti až do . Vzhledem k tomu, že úhlová výška objektů nad obzorem nemůže být nikdy větší než , zdá se být možnost měřit úhlové vzdálenosti až do nadbytečná. Sextantem však můžeme měřit i úhlové vzdálenosti pozemských objektů (majáků, ostrovů, věží, vysílačů apod.), což lze rovněž použít ke stanovení polohy. Je-li na moři pod objektem, jehož výšku chceme měřit, mlha a tudíž nevidíme mořský horizont, lze měřit úhlovou vzdálenost objektu od horizontu na opačné straně (přes zenit) a tato úhlová vzdálenost již překračuje . V neposlední řadě – při měření pomocí umělého horizontu, jak uvidíme dále, měříme vždy dvojnásobek výšky objektu a pak je třeba, aby rozsah stupnice sextantu byl co největší.

Na rámu sextantu jsou také umístěny filtry různých barev a „tmavostí", které lze otáčením umístit do cesty paprskům od přímého i odraženého obrazu. Pomocí filtrů můžeme odstínit část přicházejícího světla, např. při měření Slunce, popřípadě zvýšit kontrast mezi přímým a odraženým obrazem.
Většina sextantů (výjimku tvoří snad jedině u nás nejlevněji dostupný plastový sextant Davis Mark 3) má vnější obvod rámu ozubený. Konec alhidády je vybaven šnekovým převodem, kterým můžeme otáčet prostřednictvím mikrometrického bubínku. To umožňuje posun alhidády o velice malé úhly, s přesností typicky nebo . Stiskem uvolňovací páčky můžeme šnekový převod uvolnit a posunovat alhidádou volně, bez otáčení bubínku. Tímto způsobem nastavíme úhel nahrubo. Při práci s takovým sextantem je ale třeba vždy dodržovat určitá pravidla, nechceme-li jej poškodit.[1]


Kompas



Kompas je zařízení k určování světových stran. Typický kompas obsahuje volně pohyblivou magnetickou střelku, která se vlivem zemského magnetického pole natáčí ve směru magnetického severu a jihu.
Prvním kompasem byl patrně kus magnetovce, plovoucí na dřevěné podložce v nádobě s vodou. Kompasy jsou známy ze starověké Číny. První zmínka o kompasu pochází z 9. století. Klasický kompas, používaný ve středověku a novověku hlavně v námořní dopravě, se skládá ze střelky tvaru štíhlého kosočtverce, umístěné v pouzdře, na jehož dně je nakreslena kompasová růžice.
Běžné kompasy sestávají z magnetické střelky s barevně (červeně) označeným koncem směřujícím k severu a pouzdra, které střelku chrání, umožňuje její otáčení kolem svislé osy a je v horní části průhledné, aby bylo možné odečítat směr. Pouzdro bývá naplněno tekutinou, která zpomaluje pohyb střelky a tím zkracuje dobu jejího ustálení. Na spodní části pouzdra bývá směrová růžice a případně i úhlová stupnice, které umožňují (po natočení pouzdra ve směru střelky) pohodlněji odečítat světové strany nebo přibližný azimut. Existují i mírně odlišné konstrukce, například kulový kompas, který umožňuje měření při větším náklonu a mívá rysku pro odečet azimutu pro navigaci například na lodích a v letadlech.
GPS navigace
V současné době je nejpoužívanějším systémem satelitní navigace GPS (Global Positioning System). Nachází velmi širokého užití: od automobilů, záchranné služby, přes navádění lodí a letadel až po finanční sektor, kde slouží k přesnému určování času jednotlivých transakcí. Kromě navigace jsou globální navigační systémy důležité pro přesný čas (UTC – Universal Time Coordinated) a jeho šíření po celém světě. Přestože dnes GPS nachází široké civilní uplatnění, jedná se původně o systém vojenský. Měl totiž sloužit asi 40 000 vojenských uživatelů, nyní jej však využívá přes 20 milionů civilních a vojenských uživatelů po celém světě.
Podívejme se nyní na podstatu fungování GPS. Na oběžných drahách ve výšce asi 20 000 km nad zemským povrchem se pohybují satelity, které oběhnou Zemi za necelých dvanáct hodin. Základní výbavou každého z těchto satelitů jsou troje až čtvery atomové hodiny pro určování přesného času a vysílač signálu. Do vybavení satelitů také patří systém NUDET (Nuclear Detonation) pro detekci a lokalizaci jaderných výbuchů.
Satelity GPS vysílají dva druhy signálů. Označují se C/A-code (Coarse Acquisition) a P-code (Precision). První je rychlejší, slouží zejména k prvnímu odhadu pozice. Druhý signál je pomalejší, poskytuje však velmi přesné informace o poloze. Signál, který satelit vysílá, obsahuje zejména informace o jeho pozici a přesný čas.
Na pěti místech na Zemi jsou umístěny stanice, které monitorují satelity na oběžných drahách. Informace se posílají do řídicího centra v Coloradu, kde se na jejich základě určují přesné polohy a odchylky v určování času jednotlivých satelitů. Ty jsou také vybaveny malými raketovými motory, které umožňují drobné korekce dráhy.
Přesný čas a znalost pozice satelitu je pro určení polohy uživatele zásadní. Přijímač porovná čas, kdy byl signál ze satelitu vyslán, s časem, kdy jej přijal. Signál se šíří rychlostí světla , proto lze snadno z rozdílu těchto časů vypočítat vzdálenost satelitu od přijímače:




Jeden takovýto údaj není postačující, protože množina všech bodů v zadané vzdálenosti tvoří kulovou plochu. Pokud přidáme údaje z dalšího satelitu, dostaneme průnik dvou kulových ploch. To stále není postačující pro přesnou lokalizaci. Teprve z průniku alespoň tří kulových ploch můžeme získat aktuální pozici přijímače na zemském povrchu.
Z matematického hlediska se jedná o úlohu nalézt průsečík tří kulových ploch. Ve středu každé z těchto kulových ploch se nachází satelit, jehož poloha je známá. Řešení provedeme pomocí analytické geometrie. Úloha tak přejde na soustavu tří kvadratických rovnic o třech neznámých.
Zvolme nejprve kartézskou soustavu souřadnic tak, že její počátek se bude nacházet ve středu Země. Za osu zvolíme zemskou osu. Rovinu ztotožníme s rovinou zemského rovníku. Za kladnou poloosu přitom vezmeme poloosu procházející nultým poledníkem a za kladnou poloosu zvolíme poloosu procházející východní délky. Označme dále polohu -tého satelitu . Označíme-li poloměry příslušných kulových ploch po řadě , dostaneme příslušnou soustavu kvadratických rovnic, která odpovídá průniku všech tří kulových ploch:










Odečtením třetí rovnice od první a druhé rovnice odstraníme z těchto prvních dvou rovnic druhé mocniny neznámých:



kde


jsou konstanty. První dvě rovnice jsou lineární, lze tedy snadno vyjádřit neznámé a pomocí . Výrazy a , které tak vzniknou, dosadíme do třetí rovnice a získáme tak kvadratickou rovnici s jedinou neznámou . Tato rovnice má dvě řešení. Jedno však můžeme zcela vyloučit, protože se nachází příliš vysoko nad zemským povrchem. Tím dostaneme jediné vyhovující řešení .



Nyní zbývá ze získaného řešení, které jsme počítali v kartézské soustavě souřadnic, vypočítat zeměpisnou šířku , zeměpisnou délku a nadmořskou výšku . Připomeňme, že




Zároveň vzdálenost bodu od středu Země je

Nadmořskou výšku pak získáme jako rozdíl vzdálenosti a poloměru Země km:



Znázorníme-li řez zeměkoulí oběma póly a naší výslednou pozicí , dostaneme:
odkud plyne vztah . Zeměpisnou šířku lze tedy vypočítat podle vztahu


Poznamenejme ještě, že úsečka se nachází v rovině rovníku, tj. v rovině . Tam vypadá situace následovně:

Vzhledem k tomu, že , dostáváme vztahy



z nichž už lze dopočítat zeměpisnou délku . Tím jsme převedli kartézské souřadnice polohy přijímače na zeměpisnou šířku, délku a nadmořskou výšku.[2]
Nautical Almanac
lmanac Nautical Almanac je ročenka určená pro astronavigaci. Vydávají jej společně dvě instituce, H.M. Nautical Almanac Office (United Kingdom Hydrographic Office) a United States Naval Observatory. Jeho nejsnáze dostupnou verzi, tzv. Commercial Edition, vydává Paradise Cay Publications, Inc., www.paracay.com. Náplň Commercial Edition je, až na pár úprav, identická s náplní Nautical Almanacu. Na internetu lze také nalézt online verzi Almanacu. Na adrese www.tecepe.com.br/scripts/AlmanacPagesISAPI.isa lze nalézt tzv. Online Nautical Almanac. Nejedná se o službu poskytovanou vydavatelem tištěného Nautical Almanacu, proto nelze zaručit správnost údajů v něm uvedených. Nicméně i přesto je to dobrá pomůcka pro všechny, kteří si tištěnou verzi nepořídí.
Nejobsáhlejší část Nautical Almanacu obsahuje tabelované hodnoty GHA (Greenwich Hour Angle) a deklinace (Dec) pro každou hodinu každého dne v roce zaokrouhlené na obloukové minuty. Každá dvojice hřbetem spolu sousedících stran obsahuje vždy informace pro tři po sobě následující dny. Levá strana z dvojice obsahuje GHA jarního bodu (ARIES), GHA a deklinaci Venuše, Marsu, Jupiteru a Saturnu a SHA (Solar Hour Angle) a deklinaci 57 navigačních hvězd. Pravá strana z dvojice obsahuje GHA a deklinaci Slunce, Měsíce a horizontální paralaxu Měsíce. Písmena N a S před hodnotami deklinací určují, zda je deklinace severní (North) nebo jižní (South). Při zapisování údajů z Almanacu je třeba tuto konvenci dodržovat, tj. nenahrazovat písmena N a S znaménky + nebo ! Při určování korekcí pro interpolaci deklinace se znaménko těchto korekcí stanovuje podle toho, zda hodnota deklinace roste nebo klesá, přičemž hodnotou deklinace se rozumí pouze číselný údaj, bez ohledu na písmeno N nebo S.

U některých ze sloupců (na levé straně vždy jen dole pod celým sloupcem hodnot, na pravé straně dole pod sloupcem Dec pro Slunce a u každé hodnoty GHA a Dec pro Měsíc) jsou uvedeny ještě pomocné veličiny a , vyjádřené v úhlových minutách, sloužící k interpolaci hodnot GHA a Dec.

Každá pravá strana dále obsahuje časy východů a západů Slunce a Měsíce a okamžiky občanského a nautického soumraku pro zeměpisné šířky od do . Uvedeny jsou také magnitudy planet (které najdeme za každým názvem planety), SHA a okamžiky průchodů meridiánem pro planety (v pravém dolním rohu levé strany), dále průchody Slunce a Měsíce meridiánem a fáze Měsíce (v pravém dolním rohu pravé strany).


Zadní část Almanacu obsahuje dvě sekce označené jako „Explanation" a „Sight reduction procedures". První z nich obsahuje podrobné vysvětlení obsahu Almanacu a návod, jakým způsobem interpolovat hodnoty z tabulek. Druhá část obsahuje „recepty", pomocí nichž můžeme zpracovat měření výšek nebeských objektů od začátku až do konce a získat astronomicky určenou polohu; obsahuje také řadu příkladů.
Vůbec nejčastěji otevíranou částí Almanacu je 30 stran označených „Increments and Corrections", sloužících k interpolaci tabelovaných hodnot GHA a Dec. Pro jejich rychlé nalezení jsou okraje stran barevně zvýrazněny. Každá strana obsahuje vždy dvě tabulky pro dvojici celých minut, označených v záhlaví, a celé sekundy v rámci těchto minut. Levá polovina každé tabulky jsou přírůstky (increments) GHA pro danou minutu a její sekundy. Pravá polovina každé tabulky obsahuje korekce zohledňující nerovnoměrné změny GHA a Dec v závislosti na čase. Vstupní hodnotou je vždy parametr nebo , výstupní hodnotou je korekce (Corr) GHA nebo Dec.

První tři a poslední dvě strany Almanacu jsou věnovány korekcím, o které je třeba opravit naměřené údaje. Nautical Almanac je koncipován především pro měření nad mořským, nikoliv umělým, horizontem, a proto některé z těchto korekcí při cvičení na souši nevyužijeme, ba dokonce v některých případech použití korekčních tabulek z Almanacu zpracování měření pořízených přes umělý horizont komplikuje.[1]
Způsoby navigace

Navigace může být prováděna například těmito způsoby:
- osobním dorozumíváním (osoba znalá místa, průvodce)
- pomocí orientačního značení (dopravní značení, turistické značení, označování ulic, označování domů, vlastní značení atd. )
- srovnávací navigací – porovnávaní terénu a mapy
- terestricky pomocí kompasu (magnetický nebo gyroskopický), logu, hloubkoměru, námořní mapy
- astronavigace pomocí polohy Slunce, Měsíce a hvězd – pomocí úhloměru a přesných hodin
- radionavigačními přístroji – pomocí radiomajáků (NDB, VOR), měřiče vzdálenosti DME a radiokompasu
- pozemním navigačním systémem – např. LORAN, OMEGA
- globálním družicovým polohovým systémem pomocí umělých družic – např. systémy GPS, GLONASS nebo Galileo
Odkazy
Reference
- SCHEIRICH, Petr. Základy astronavigace pro začátečníky [online]. 2010 [cit. 2021-04-04]. Dostupné v archivu pořízeném dne 2016-04-16.
- HALAS, Zdeněk. Princip satelitní navigace [online]. [cit. 2021-04-02]. Dostupné online.
Literatura
- P. Scheirich, Jak se neztratit na moři. In: Vesmír 10/2018, str. 570-574
- Z. Mošna, Vznik a princip fungování GPS. In: Vesmír 10/2018, str. 574-578
Související články
- Let podle přístrojů - IFR
- Globální družicový polohový systém
- Námořní navigace
- Mechanismus z Antikythéry
- Automobilový navigační přístroj – autonavigace
- Turistický navigační přístroj – turistická navigace
- Orientační bod
- Kartografie
Externí odkazy
 Obrázky, zvuky či videa k tématu navigace na Wikimedia Commons
Obrázky, zvuky či videa k tématu navigace na Wikimedia Commons - Galerie navigace na Wikimedia Commons
- Sextant tutorial [online]. [cit. 2011-11-09]. Dostupné v archivu pořízeném dne 2011-12-14. (anglicky)
- Námořní navigace sextantem [online]. [cit. 2011-11-09]. Dostupné online. (česky)
- Základy astronavigace – http://sajri.astronomy.cz/astronavigace/ Archivováno 3. 2. 2020 na Wayback Machine
 Slovníkové heslo navigace ve Wikislovníku
Slovníkové heslo navigace ve Wikislovníku
- Lectures in Navigation by Ernest Gallaudet Draper
- How to navigate with less than a compass or GPS