Kartografie
Kartografie je umění a věda zabývající se tvorbou a zpracováním map.

Definice
OSN definuje kartografii jako vědu o sestavování map všech druhů a podle OSN zahrnuje veškeré operace od počátečního vyměřování až po vydání hotové produkce.[1]
Mezinárodní kartografická asociace (ICA) definuje kartografii jako umění, vědu a technologie vytváření map, včetně jejich studia jako vědeckých dokumentů a uměleckých prací.[2]
ČSN definují kartografii jako vědní obor zabývající se znázorněním zemského povrchu a nebeských těles a objektů, jevů na nich a jejich vztahů ve formě kartografického díla a dále soubor činností při zpracování a využívání map.[3]
Geoinformační definice zní: Kartografie je proces přenosu informací, v jehož středu je prostorová datová báze, která sama o sobě může být považována za mnohovrstevný model geografické skutečnosti. Taková prostorová datová báze je základnou pro dílčí kartografické procesy, pro něž čerpá data z rozmanitých vstupů a na výstupu vytváří různé typy informačních produktů.[4]
Země a síť myšlených čar
Země
Země, kterou si běžně představujeme jako kouli, je ve skutečnosti na pólech poněkud zploštělá. Poloměr v rovníkové rovině je 6378 km, poloměr v rovině, která prochází oběma póly, je 6356 km. Lépe než jako kouli, je tedy možné popsat Zemi jako rotační elipsoid. Problematikou volby referenčních ploch a jejich vzájemných zobrazení se zabývá matematická kartografie.
Zemská osa
Zemská osa, kolem níž se Země otáčí, je myšlená přímka, kolmá k rovině rovníku, procházející středem Země a oběma zeměpisnými póly.
Zeměpisné póly
Zeměpisné póly jsou myšlené body na severní a jižní polokouli, kde zemská osa protíná povrch Země. Na severním zeměpisném pólu se Země otáčí proti směru, na jižním po směru pohybu hodinových ručiček.
A — střed Země; B — zemská osa; C — poledník; D — protipoledník poledníku C; C—D — poledníková kružnice; E — rovina proložená zemskou osou; F — rovník; G — rovina kolmá k zemské ose proložená středem Země
Poledníky
Proložíme-li rovinu zemskou osou, dostaneme na obvodu zeměkoule, kde tato rovina protíná její povrch, myšlenou kružnici, kterou nazýváme poledníková kružnice. Polovina této kružnice je poledník. Kterýkoliv poledník je nejkratší spojnicí protilehlých pólů po povrchu Země a určuje proto vždy směr na zeměpisný sever a jih. Poledník, který prochází určitým bodem na zeměkouli, nazýváme místním poledníkem pro tento bod. Protilehlá polovina poledníkové kružnice je protipoledníkem místního poledníku. Poledník, který prochází londýnskou hvězdárnou v Greenwichi, je obvykle považován za základní (nultý) poledník, a nazývá se greenwichský základní poledník. Pootočíme-li poledníkovou kružnici tohoto poledníku kolem zemské osy vždy o jeden stupeň, dostaneme celkem 180 poledníkových kružnic, což je 360 poledníků. Tyto poledníky jsou číslovány od základního poledníku směrem na východ i západ. Protipoledník základního poledníku má tedy číslo 180. Rozdělíme-li úhlovou vzdálenost mezi dvěma sousedními poledníky na 60 stejných dílků (minut) a každým tímto dílkem vedeme další poledník, dostaneme minutové poledníky. Obdobným dělením vzdálenosti mezi minutovými poledníky dostaneme 60vteřinových poledníků.
Rovník
Proložíme-li rovinu kolmou k zemské ose středem zeměkoule, dostaneme po obvodu Země, kde tato rovina protíná její povrch, myšlenou kružnici — rovník. Rovník dělí zeměkouli na severní a jižní polokouli. Délka rovníku, který je nejdelší kružnicí na zeměkouli, je přibližné 40 000 km.
Rovnoběžky
Rovnoběžka je kružnice, která vzniká, protneme-li zemský povrch rovinou kolmou k zemské ose. Nejdelší rovnoběžkou je tedy rovník. Délka rovnoběžek se zkracuje od rovníku k pólům. Rovnoběžky leží ve směru východ — západ a protínají se proto s poledníky vždy v pravém úhlu. Rozdělíme-li kterýkoliv poledník ze středu Země na 180 stupňů a body, jež jsme takto získali, proložíme rovinami kolmými k zemské ose, vznikne protnutím těchto rovin s povrchem Země 180 rovnoběžek, 90 na severní a 90 na jižní polokouli. Rovnoběžky jsou číslovány od rovníku směrem k pólům. Rovník je pokládán za nultou rovnoběžku, póly jsou devadesátými rovnoběžkami. Rozdělíme-li úhlovou vzdálenost mezi dvěma sousedními rovnoběžkami na 60 stejných dílů (minut) a vedeme těmito dílky roviny kolmé k zemské ose, dostaneme minutové rovnoběžky. Rozdělíme-li vzdálenost mezi dvěma sousedními minutovými rovnoběžkami na dalších 60 stejných dílků (vteřin), získáme obdobným způsobem vteřinové rovnoběžky.
Udávání poloh
Udávání poloh pomocí zeměpisných souřadnic
Zeměpisnými souřadnicemi rozumíme poledníky a rovnoběžky. Každý bod na povrchu Země leží na průsečíku některého poledníku a některé rovnoběžky. Chceme-li určit polohu některého bodu na povrchu Země pomocí zeměpisných souřadnic, označíme ji číslem rovnoběžky a číslem poledníku, které tímto bodem procházejí. Používáme k tomu číslovaní ve stupních, minutách a vteřinách. Vzdálenost rovnoběžky udávaného bodu od rovníku nazýváme zeměpisnou šířkou, a to severní (s. š.), je-li udávaný bod na sever od rovníku, a jižní (j. š.), je-li na jih od rovníku. Vzdálenost poledníku udávaného bodu od nultého poledníku nazýváme zeměpisnou délkou, a to východní (v. d.), je-li udávaný bod na východ od základního poledníku, a západní (z. d.), je-li na západ od základního poledníku. Jako první se zpravidla uvádí zeměpisná šířka a jako druhá zeměpisná délka. Lze také použít písmen, které vycházejí z anglosaského značení základních zeměpisných směrů, to jest N pro sever, E pro východ, S pro jih a W pro západ. Pak by údaj příslušné polohy vypadal např. následovně: N 60°00'08" — E 82°33'14". Čísla poledníků a rovnoběžek bývají vyznačeny na okrajích map. Celé stupně bývají označeny číselně, minuty zpravidla graficky po desítkách, vteřiny se téměř vždy musí odměřovat.
Určovaní poloh jiným souřadicovým systémem nebo kódem
K různým účelům mohou být na mapách zakresleny jiné než zeměpisné souřadnicové systémy, které lze použít k více či měně přesnému určovaní poloh příjemcem, který má k dispozici mapu se stejným souřadnicovým systémem nebo kódem.
Velká a malá kružnice na zeměkouli, loxodroma a ortodroma
Velká kružnice
Protneme-li povrch Země rovinou, která prochází středem Země, vytvoří nám průsečnice této roviny s povrchem zeměkoule takzvanou velkou kružnici. To znamená, že velkými kružnicemi jsou mimo jiné i všechny poledníkové kružnice a rovník. Naprosto však není podmínkou, aby roviny velkých kružnic byly kolmé k zemské ose.
Malá kružnice
Protneme-li povrch zeměkoule rovinou, která neprochází středem Země, vytvoří nám průsečnice této roviny s povrchem zeměkoule takzvanou malou kružnici. To znamená, že malými kružnicemi jsou také všechny rovnoběžky kromě rovníku.
Loxodroma
Loxodroma je křivka na povrchu zeměkoule, která protíná všechny poledníky pod stejným úhlem. Je-li tento úhel nulový nebo má 90°, je loxodroma uzavřenou kružnicí. Loxodromami jsou tedy všechny poledníky a všechny rovnoběžky včetně rovníku. Je-li úhel mezi loxodromou a poledníky větší než 0° a menší než 90°, je loxodroma spirálou, která obtáčí zeměkouli a končí v zeměpisných pólech.
Ortodroma
Ortodroma je nejkratší spojnice dvou míst na zeměkouli vedená po jejím povrchu. Ortodroma je kratší část velké kružnice, která prochází oběma body, jež chceme spojit. Protíná poledníky pod různými úhly s výjimkou případů, kdy se jedná o část rovníku nebo poledníku.
Zobrazení Země a jejího povrchu – mapa
Referenční plochy
Skutečný tvar Země je příliš složitý na to, aby byl se všemi svými deformacemi matematicky popsán. Pro účely kartografie jej proto nahrazujeme referenční plochou. Vlastnosti referenční plochy jsou:
- Její tvar a velikost jsou podobné tvaru Země.
- Matematicky snadno definovatelná.
- Nahrazuje Zemi jako celek nebo lokálně.
Typy referenčních ploch:
Geoid
Nejpřesnější aproximace zemského povrchu. V kartografii kvůli těžké matematické popsatelnosti většinou nahrazován jinými referenčními plochami. V současné době je průběh geoidu znám s přesností v řádech 0,1 – 1 m. (neustále se zpřesňuje).
Elipsoid
Poměrně dobře vystihuje tvar Země. Matematicky je relativně snadno definovatelný. Existuje řada různých elipsoidů, které se liší svými parametry: Typy elipsoidů:
- Tříosý elipsoid
Vzhledem ke složitější geometrii se nepoužívá.
- Rotační elipsoid (dvouosý)
Je definován poloosami a,b. Dvouosý elipsoid, vzniká rotací elipsy kolem vedlejší poloosy. Podle aproximace zemského povrchu ho dělíme na: a) Zemský elipsoid (aproximace genoidu) Střed Zemského elipsoidu je totožný s hmotným středem země (geocentrem). Jeho malá poloosa je totožná se středem rotace. b) Referenční elipsoid (aproximace části genoidu) Střed Referenčního elipsoidu není totožný se středem Země. Na vybraném území aproximuje lépe než Zemský elipsoid.
Přehled známých elipsoidů
| Elipsoid | a [m] | b[m] |
|---|---|---|
| Besselův | 6377397,1550 | 6356078,9633 |
| Hayfordův | 6378388,0000 | 6356911,9461 |
| Krasovského | 6378245,000 | 6356863,0188 |
| WGS 84 | 6378137,0000 | 6356752,3142 |
| Clarkův (1880) | 6378249,145 | 6356514,8696 |
| GRS 80 | 6378137,0000 | 6356752.3141 |
| NAD 192 | 6378206,4000 | 6356583,8000 |
| IAG 196 | 6378160,0000 | 6356774,5160 |
Koule
Má větší odchylky od geoidu než elipsoid, ale má jednodušší matematickou definici. Proto se koulí mnohokrát elipsoid nahrazuje se zachováním objemu, plochy a přepočtením poloměru podle aritmetického průměru poloos elipsoidu.
Rovina
V matematické kartografii představuje rovina cílovou plochu, na kterou zobrazujeme rovinu mapy. Je to tečná rovina v daném bodě. Používá se jen pro zobrazení malých území (20 x 20 km), jinak vznikají velké výškové a polohové odchylky. Referenční rovina nebere v úvahu zakřivení Země.
Topografická plocha
Skutečný, zcela holý povrch Země bez objektu, ale se všemi svými nerovnostmi včetně hladin moří, nazýváme topografickou plochou.
Topografická situace
Souhrn všech terénních útvaru na topografické ploše, jako jsou jezera, řeky, sněhové a ledové pláne, lesy, pole, včetně všech objektů, jako jsou silnice, železnice, města, hrady apod., nazýváme topografickou situací.
Mapa
Mapa je zmenšený rovinný geometrický obraz, získaný některou zobrazovací metodou - projekcí celého zemského tělesa, anebo jeho částí - generalizací horizontální i vertikální členitosti zemského povrchu s vyznačením situace a průběhu komunikací a jiných technických děl, porostů, kultury a osídlení, domluvenými značkami.
Druhy map a jejich měřítko
Do mapového obrazu jsou zahrnuté jen jevy, které mají význam pro uživatele mapy a jsou zobrazitelné ve stanoveném zmenšení. Když jde o kolmý průměr obrazu zemského povrchu do jedné horizontální roviny, potom tento zvláštní případ mapy nazýváme plánem. Jeho obsah se zkreslením rychle rostoucím od jeho středu, prakticky omezuje jen na malé území. Obsáhlý soubor map vybudovaný na základě různých územních zájmů a potřeb kulturně vyspělého státu, můžeme roztřídit z různých hledisek: podle původu, podle účelu a obsahu, podle měřítka.
- Mapa, která vznikla na podkladě celkového, anebo částečného měření v terénu je mapa původní. Každá mapa, která vznikla bez místního vyšetřování a měření je mapa odvozená.
- Účel a obsah mapy spolu úzce souvisí. Mapy, ve kterých jsou předměty a jevy volené tak, aby vyhověly většině uživatelů map a byly přiměřené měřítku, jsou rozdílné od map účelových (tematických), jejichž náplň je usměrněná podle zvláštního účelu, kterému mají sloužit. Sem patří například mapy letecké ale i geologické, cestovní, lesnické, meteorologické, geofyzikální a jiné.
- Měřítko mapy vyjadřuje v jakém poměru je na mapě zmenšená odpovídající část zemského povrchu. Měřítko nám udává poměr délky na ploše zobrazované (mapě) ke stejné délce na ploše originální (referenční koule, elipsoid ap.). Měřítko mapy vyjadřujeme zlomkem:

- m - měřítkové číslo - součinitel, kterým je třeba násobit odměřenou délku na mapě pro získání skutečné délky
- s´ - délka na mapě
- s - délka ve skutečnosti
Měřítko mapy lze vyjádřit různými způsoby:
- Poměrem
Je to nejčastěji používaný způsob. Měřítko mapy 1:100 000 je poměr, který nám říká, že vzdáleností na mapě se mají ke vzdálenostem ve skutečnosti v poměru 1:100 000; 1 cm na mapě představuje tedy 100 000 cm, to je 1 km ve skutečnosti.
- Graficky
Měřítko bývá na mapě zpravidla vyjádřeno také graficky. Úsečky grafického měřítka představují vzdálenosti na mapě, čísla u těchto úseček vzdálenosti ve skutečnosti.
- Přirovnáním
Na některých mapách bývá měřítko vyjádřeno přesným přirovnáním vzdáleností na mapě k vzdálenosti ve skutečnosti, např. 1 cm = 5 km.
Rozdělení map
Mapa zaujímá ve společnosti významné místo. Je důležitým činitelem ve vědě a výzkumu, školství, kultuře, hospodářství, plánování, statistice, výstavbě, obchodě, dopravě, zemědělství, turistice, při obraně státu a při vzdělávání vůbec. Ze všech těchto kritérií je možné rozdělovat mapy podle účelu, jaký mapy plní. V oblasti dopravy můžeme členit mapy na železniční, silniční, letecké, vodní. Z hlediska geometrické přesnosti a stupně generalizace mapového obsahu je nejobvyklejším rozdělením map podle měřítka. Měřítko už udává uživateli bez podrobnějšího zkoumání, jaké asi možnosti mapa poskytuje v informativním i konstrukčním použití a zpravidla se dá z ní usuzovat i původ mapy.
| Měřítko | Druh map | Původ | Skupina měřítek |
|---|---|---|---|
| 1:500, 1:1 000, 1:2 000, 1:5000, 1:10 000 | Technicko-hospodářské | většinou původní mapy | velkých |
| 1:25 000, 1:50 000, 1:100 000 | Topografické | odvozené mapy | středních |
| 1:200 000, 1:500 000, 1:1 000 000 | Zeměpisné | odvozené mapy | malých |
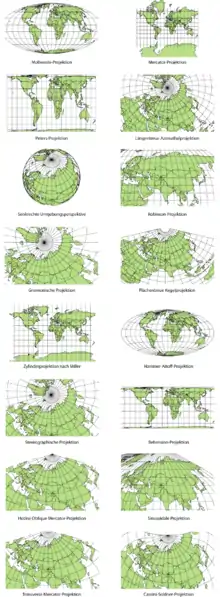
Kartografické projekce
Geografická síť referenčního elipsoidu, anebo referenční koule promítnutá anebo zobrazená na rovinu, válec anebo kužel, dává na zobrazovacích plochách charakteristické obrazy geografické sítě, které se liší na první pohled. S ohledem na velké množství projekcí je účelné a potřebné, aby se zobrazovací metody roztřídily - klasifikovaly. Roztřídit je můžeme podle různých kritérií. Především je můžeme klasifikovat podle:
- zobrazovacích ploch
- zkreslení
Klasifikace kartografických projekcí podle zobrazovacích ploch
Projekce třídíme na:
- pravé
- nepravé (konvencionální)
Pravé projekce podle zobrazovacích ploch dělíme na:
- a) azimutální
- b) kuželové (kónické)
- c) válcové (cylindrické)
- d) kulové (globus)
Pravé projekce
Pravé projekce v normální poloze jsou geometricky jednoduše definované. Obrazy rovnoběžek jsou funkce zeměpisných šířek a obrazy poledníků jsou funkcí zeměpisných délek. Pravé projekce můžeme dále třídit na
- perspektivní
Perspektivní projekce jsou takové, ve kterých obrazy geografické sítě získáme na zobrazovacích plochách promítnutím ve smyslu deskriptivní geometrie.
- neperspektivní
Neperspektivní projekce jsou takové, ve kterých obrazy geografické sítě nemůžeme získat žádným promítnutím, ale konstruujeme je na zobrazovacích plochách na základě zvolených geometrických a matematických podmínek.
Nepravé projekce
Nepravé projekce jsou taková zobrazení v poloze normální, ve kterých obrazy rovnoběžek jsou funkcí zeměpisných šířek, jako při pravých zobrazeních, ale obrazy poledníků jsou funkcí zeměpisných šířek a délek. Obrazy rovnoběžek budou mít tedy vzhled jako u pravých projekcí, ale obrazy poledníků budou čáry vyššího stupně (elipsy, sinusoidy, křivé čáry ap.). Mají význam jen v kartografické praxi.
Klasifikace kartografických projekcí podle polohy zobrazovací plochy a středu promítání
Dělení projekcí podle polohy zobrazovací plochy rozlišujeme při promítání na rovinu a na ostatní zobrazovací plochy
V případě roviny rozeznáváme následující polohy
- pólová
- všeobecná (šikmá, horizontální)
- rovníková (ekvatoriální, příčná)
V případě kuželu, anebo válce rozeznáváme polohy
- normální
- příčná (transverzální)
- šikmá (všeobecná)
S ohledem na polohu středu promítání třídíme perspektivní projekce na:
- gnómonické (střed promítání ve středu Země)
- stereografické (střed promítání na obvodu Země oproti bodu dotyku zobrazovací roviny)
- externí (střed promítání mimo Zemi)
- ortografické (střed promítání v nekonečnu)
Klasifikace kartografických projekcí podle zkreslení
Při zobrazování referenční plochy (koule, elipsoidu,...) na zobrazovací plochu (rovina, kužel, válec), dochází nevyhnutelně ke zkreslení některých zobrazovaných parametrů. Podle charakteru zkreslení dělíme kartografické projekce na:
- délkojevné (ekvidistanční)
- úhlojevné (konformní)
- plochojevné (ekvivalentní)
- tvarojevné (ortomorfní, nedají se matematicky definovat)
- vyrovnávací (kompenzační)
Azimutální projekce
V azimutálních projekcích je zobrazovací plochou rovina.
Pólová gnomonická projekce
Střed promítání je ve středu Země. Všechny ortodromy se jeví na mapách této projekce jako přímky. (Ortodroma je čára, jejíž rovina prochází středem Země. Když střed promítání je ve středu Země a je totožný s rovinou ortodromy, nutně se tato zobrazuje na gnómonických mapách jako přímka). Obrazy poledníků jsou přímky sbíhající se v bodu dotyku, obrazy rovnoběžek jsou koncentrické kružnice se středem v pólu (bod dotyku).
Pólová gnomonická projekce je projekce ortodromická, protože ortodroma se na ní zobrazuje jako přímka. To se s výhodou používá na zakreslení průběhu ortodromy do map jiných projekcí tak, že zeměpisné souřadnice podrobných bodů ortodromy odčítáme na mapě v gnómonické projekci a vyneseme je do mapy jiné projekce. Spojením těchto bodů dostáváme průběh ortodromy.
Zobrazovací rovnice:
- ε = λ - zobrazení poledníků
- r = R.cotgφ - zobrazení rovnoběžek
Stereografická polární projekce
Střed promítání je v opačném pólu, než je pól, ve kterém se dotýká Země zobrazovací rovina. Je tedy vzdálený od zobrazovací roviny ve vzdálenosti 2R. Patří mezi projekce pravé, perspektivní.
Zobrazovací rovnice:
- ε = λ - zobrazení poledníků
- r = 2R.tg(θ/2) kde θ=90°-φ
Obrazy poledníků jsou přímky sbíhající se v pólu (bodě dotyku), obrazy rovnoběžek jsou koncentrické kružnice, se středem v tomto bodu. Obraz geografické sítě je tedy podobný gnomonické polární projekci. Délkové zkreslení ve směru poledníků je ale menší. Tato projekce je konformní.
Kuželové projekce
Sem zařazujeme všechna zobrazení na plochu kuželovou, dotýkající se referenčního elipsoidu či koule, anebo protínající tyto plochy (sečný kužel). V místě, kde se kužel dotýká referenční koule (anebo ji protíná) se nachází dotyková rovnoběžka (sečná rovnoběžka), na které je nulové zkreslení. Podle toho, zda je použitý kužel dotykový, nebo sečný, máme projekci s jednou, nebo dvěma základními (standardními) rovnoběžkami. Na kuželových projekcích v normální poloze, jsou obrazem poledníků přímky sbíhající se ve vrcholu kužele. Úhel, který svírají se nerovná zeměpisné délce, jako v azimutálních projekcích v pólové poloze, ale jsou zkreslené koeficientem sbíhavosti poledníků n=sin.φ0, kde φ0 - zeměpisná šířka dotykové rovnoběžky
Normální kuželová projekce
Je všeobecně zkreslená. Využívá se jen jako mapa informativní, patří mezi projekce pravé, perspektivní.
Zobrazovací rovnice:
- ε = n.λ
- r = R.cotgφ
Konformní kuželová Lambertova projekce
Projekce je konformní. Pro její zobrazení se volí sečný kužel v polykónickém uspořádání. Ortodroma do vzdálenosti 1 200 km se prakticky jeví jako přímka. Loxodroma se zobrazuje jako logaritmická spirála, což je částečně nevýhodou. Do vzdálenosti 500–800 km ji můžeme nahradit přímkou. Traťový úhel je potřebné odměřovat bud ve středu trati nebo jej opravovat o sbíhavosti poledníků (jako v každé kuželové a azimutální pólové projekci). Patří mezi projekce pravé, neperspektivní.
Zobrazovací rovnice:
- ε = n.λ
- ρ = ρ0[(tg (φ/2 + 45∘)/tg (φ/2 + 45∘)]sinρ0
Křovákovo zobrazení
Po r. 1918 bylo potřebné zavést novou, vhodnou, jednotnou zobrazovací soustavu pro celé území ČSR. Z vícerých návrhů se dne 16. 12. 1937 definitivně rozhodlo o zavedení zobrazení, které vypracoval tehdejší přednosta Triangulační kanceláře Ing. Křovák. Ing. Křovák použil konformní zobrazení koule na sečný kužel ve všeobecné poloze a dosáhl na krajních kartografických rovnoběžkách délkové zkreslení +14 cm na km a -10 cm na km. Vzhledem k tomu, že byl použitý kužel ve všeobecné poloze, bylo dosaženo toho, že standardní rovnoběžky sledují protáhlý tvar našeho státu. Proto bylo možné dosáhnout vysoké přesnosti a tato projekce nejlépe ze všech vyhovuje pro zobrazení ČR. Projekce patří mezi pravé, neperspektivní.
Válcová projekce
Všechny válcové projekce jsou promítnutím referenční koule na dotykový nebo sečný válec, který se rozprostírá do roviny.
Mercatorova mapa
Síť se podobá normální válcové projekci perspektivní. Kartografická síť je ale upravená, umělým zvětšením měřítka ve směru poledníků (jejich roztáhnutím), které je úměrné změně měřítka ve směru rovnoběžek.
Zobrazovací rovnice: X = R . λ Y = R . ln tg(φ/2 + 45∘)
Merkátorova mapa je mapa loxodromická (loxodroma se zobrazuje jako přímka). Ortodroma se zobrazuje jako křivka vypouklá směrem k bližšímu pólu. V současnosti už ztrácí svůj původní význam. Můžeme jí ještě použít pro zákres průběhu loxodromy do map v jiné projekci. Patří mezi projekce pravé, neperspektivní.
Gauss-Krügerova projekce
V tomto zobrazení se povrch referenčního elipsoidu rozděluje poledníky na poledníkové pásy. Každý takový poledníkový pás se zobrazuje konformně na samostatný válec v příčné (transverzální) poloze a dotýká se referenčního elipsoidu podél středního poledníkového pásu, tzv. základního poledníku, který má nulové zkreslení. Od Gaussovo konformního zobrazení se liší tím, že se tu nezobrazují poledníkové pásy referenční koule, ale zemského elipsoidu. Zobrazovací rovnice pro konformní zobrazení elipsoidických pásů na transverzální válec odvodil Krůger, proto se toto zobrazení nazývá Gauss-Krůgerovo. U nás byly použité 6° a 3° poledníkové pásy. Rovník se zobrazuje jako přímka, zvolená za osu y, je kolmý na střední poledník pásu, zvoleného za osu x. Každý pás má svojí souřadnicovou soustavu. Obrazy rovnoběžek jsou vůči obrazu rovníku symetricky zakřivené čáry, vypouklé k obrazu rovníku. Zobrazení nevzniklo promítáním, ale matematicky, proto patří mezi neperspektivní zobrazení. Poledníkové pásy jsou číslované arabskými číslicemi začínající od 180° průběžně na východ od 1 do 60. Každý poledníkový pás je potom dělený na pásy rovnoběžkové (vrstvy) široké 4° zeměpisné šířky. Jsou označené velkými písmeny latinské abecedy od rovníku k pólu. V tomto uspořádání pásů a vrstev je území ČR a SR označené M-33, M-34 a L-33, L-34.
Projekce tvoří základ leteckých map používaných naší armádou a využívá se také ve sportovním letectví. S přijatelnou přesností můžeme na mapách této projekce měřit vzdálenosti i úhly.
České osobnosti v oboru
V abecedním pořadí:
- Pavel Aretin z Ehrenfeldu
- Ing. Petr Buchar
- Johann Criginger
- Vincento Maria Coronelli
- doc. RNDr. Milan V. Drápela, CSc.
- Pavel Fabricius
- Ing. Aleš Hašek
- Martin Helwig
- prof. Ing. Vladislav Hojovec, Dr.SC
- pplk. Ing. Jiří Kánský
- Mikuláš Klaudyán
- prof. RNDr. Milan Konečný, CSc.
- Karel Kořistka
- Jan Amos Komenský
- prof. Dr. Ing. Jaroslav Kovařík, CSc.
- Ing. Josef Křovák
- RNDr. Olga Kudrnovská
- prof. RNDr. Karel Kuchař
- prof. Ing. Lubomír Lauermann, CSc.
- Ing. Milan Martinek, CSc.
- doc. Ing. Miroslav Mikšovský, CSc.
- doc. RNDr. Ludvík Mucha, CSc.
- Jan Kryštof Müller
- doc. Ing. Dr. Václav Novák, CSc.
- František Palacký
- Ing. Alena Rottová
- PhDr. Ondřej Roubík
- Ing. Zdena Roulová
- prof. Ing. Erhart Srnka, DrSc.
- Ing. Bohumil Šídlo
- RNDr. Ing. Jaroslav Uhlíř
- Ing. Vladimír Vahala, DrSc.
- Kristián Vetter
- prof. Ing. Bohuslav Veverka, DrSc.
- Jiří Matyáš Vischer
- Jan Jiří Vogt, řeholním jménem Mořic (Mauritius)
- prof. RNDr. Vít Voženílek, CSc.
Reference
- United Nations, Department of Social Affairs, 1949
- (Multilingual Dictionary of Technical Terms in Cartography - Mnohojazyčný výkladový slovník technických termínů v kartografii, Mezinárodní kartografická asociace, Wiesbaden, 1973)
- ČSN 73 0406 Názvosloví kartografie, 1984)
- (MORRISON,J.L., dlouholetý prezident Mezinárodní kartografické asociace-ICA, Reston, Virginie, USA)
Literatura
- BENEŠ, Ladislav a kolektiv. Učebnice pilota. Praha: Svět křídel, 2000. + starší vydání Učebnic pilota
- ČAPEK, Richard a kolektiv. Geografická kartografie. Praha: Státní pedagogické nakladatelství, 1992. 373 s. ISBN 80-04-25153-6.
- MIKLÍN, Jan; DUŠEK, Radek; KRTIČKA, Luděk; KALÁB, Oto. Tvorba map [PDF]. Ostrava: Ostravská univerzita, 2018-11-04. Dostupné online. ISBN 978-80-7599-017-4.
Související články
- Mapování
- Mapa
- Geodézie
- Katastr nemovitostí České republiky
- Geometrický plán
- Vytyčení hranic pozemků
- Zeměměřič
- Kartografická díla
- Polární graf
Externí odkazy
 Obrázky, zvuky či videa k tématu kartografie na Wikimedia Commons
Obrázky, zvuky či videa k tématu kartografie na Wikimedia Commons  Slovníkové heslo kartografie ve Wikislovníku
Slovníkové heslo kartografie ve Wikislovníku- ICA
- On-line mapa Evropy, České republiky, plány měst
- Multimediální učebnice dějin kartografie, Geografický ústav Přírodovědecké fakulty MU
- https://web.archive.org/web/20110127162043/http://web.natur.cuni.cz/~bayertom/Mmk/
- Geografická bibliografie ČR online Informace o kartografické produkci 20. a 21. století. Zpřístupňuje bibliografie, ale i vybrané plnotextové zdroje.
- http://www.gis.zcu.cz/studium/mk2/multimedialni_texty/