Hajabusa 2
Hajabusa 2 (jap. はやぶさ; ang. Hayabusa 2, v preklade sokol) je japonská sonda agentúry JAXA, ktorá má za cieľ preskúmať asteroid 162173 Ryugu, pristáť na ňom a priniesť vzorky späť na Zem. Úlohou je priniesť nové poznatky o vývoji solárneho systému, pôvodu vody a života na Zemi.[1][2]
| Hajabusa 2 | |
|---|---|
 | |
| COSPAR | 2014-076A |
| Katalogové číslo | 40319 |
| Štart | 3. decembra 2014 |
| Kozmodróm | Kozmické centrum Tanegašima |
| Nosná raketa | H-IIA |
| Konec misie | 2020 (plánovaný) |
| JAXA | |
| Výroba | NEC |
| Hmotnosť | 609 kg |
| MASCOT | |
| Druh | pristávací modul |
| Cieľ | asteroid Ryugu |
| Výroba | DLR, CNES |
| MINERVA-II | |
| Cieľ | asteroid Ryugu |
| Výroba | JAXA |
| Prístroje | |
| ONC | optické kamery |
| NIRS3 | spektrometer v blízkej infračervenej oblasti |
| TIR | infračervená kamera |
| LIDAR | laserový výškomer |
| Hajabusa 2 na stránkách JAXA | |
Popis sondy
Dizajn sondy vychádza z predchádzajúcej sondy Hajabusa, vypustenej v roku 2003. Telo má tvar hranolu s rozmermi 1,0 x 1,6 x 1,4 m. K nemu sú na oboch stranách pripojené dva paralelné panely fotovoltaických článkov s celkovou plochou 12 m². Celková hmotnosť sondy s palivom je 609 kg.

Poháňajú ju štyri iónové motory s ťahom 4 x 10 mN a ISP 3 000 sekúnd (ktoré však budú súčasne v prevádzke len tri a jeden bude slúžiť ako záloha) a dvanásť motorov na jednozložkové kvapalné palivo rozdelené na dva samostatné okruhy. Iónové motory boli z predchádzajúcej misie, poskytujú však o 25% viac ťahu a bola predĺžená ich životnosť.
Sonda je 3-osovo stabilizovaná pomocou gyroskopov. V porovnaní s predchádzajúcou misiou bol pridaný štvrtý, záložný gyroskop, aby mohol systém fungovať aj v prípade poruchy jedného z nich – v prvej misii Hajabusa bola po poruche nutná stabilizácia pomocou motorov.
Skákajúce roboty - hopsadlá
Pre podrobný prieskum asteroidu budú použité tri skákajúce roboty Rover-1A, Rover-1B, Rover-2 projektu MINERVA-II a modul MASCOT (Mobile Asteorid Surface Scout).
MINERVA-II je nástupcom MINERVA z Hayabusa. Skladá sa z niekoľkých samostatných systémov.
MINERVA-II-1 je kontajner, ktorý 21. septembra 2018 nasadil dva rovery - hopsadlá, Rover-1A a Rover-1B. Bol vyvinutý spoločnosťou JAXA a univerzitou v Aizu. Hopsadlá sú totožné a majú valcový tvar. Budú hopsať v nízkom gravitačnom poli s použitím krútiaceho momentu generovaného rotujúcimi hmotami. Nesú stereo kameru, širokouhlú kameru a teplomery. Solárne články a dvojvrstvové kondenzátory poskytujú elektrickú energiu.
Hopsadlá Rover-1A a Rover-1B boli pomenované ako Výr a Sova.[3]
MINERVA-II-2 kontajner vypustí ROVER-2, hopsadlo vyvinuté konzorciom univerzít vedených univerzitou Tohoku. Ide o osemuholníkový hranol. Hopsadlo má dve kamery, teplomer, akcelerometer, optické a ultrafialové LED osvetlenie na detekciu častíc prachu.

MASCOT[4] (Mobile Asteroid Surface Scout) bol vyvinutý nemeckým centrom pre letectvo a kozmonautiku a francúzskym Národným centrom vesmírneho výskumu s využitím skúseností získaných v priebehu vývoja pristávacieho modulu Philae na misii Európskej vesmírnej agentúry Rosetta. Modul v tvare pravidelného hranola nesie štyri vedecké prístroje: optické kamery MASCAM, spektrometer pre blízku infračervenú oblasť MicrOmega, rádiometer MARA a magnetometer MASMAG. MASCOT je vybavený mechanizmom umožňujúcim až 70 metrov dlhé skoky po asteroide. Batéria by mala poskytnúť dostatok energie pre 12 – 16 hodín prevádzky. MASCOT bol spustený na Ryugu 3.10.2018 03:58 UTC z výšky 51 m a na povrch dopadol po 20 minútach.[5] Podľa neskoršej správy bol vypustený rýchlosťou 4 cm/s a dopadol po 6 minútach, počas ktorých urobil 20 snímkov. Po ďalších približne 31 minútach a niekoľkých kontaktov s povrchom dosiahol MASCOT svoju prvú pozíciu odpočinku a začal meranie povrchu. Ležal ale obrátene, tak zo Zeme dostal úspešný príkaz na prevrátenie. MASCOT sa tak dostal do správnej pozície, zahájil prevádzku a automaticky spustil štyri experimenty. Merania boli úspešné. MASCOT namiesto 16 pracoval 17 hodín a 7 minút.[6]
Roboty povrch asteroidu fotografovali a merali jeho teplotu. Pohybovali sa pomocou krátkych skokov.[7]
| Hopsadlo | Hmotnosť | Rozmery | Zdroj | Dátum | Vedecký náklad |
|---|---|---|---|---|---|
| ROVER1A ROVER1B | 1,1 kg | D 18 cm x výška 7 cm | solárne panely | širokouhlá kamera, stereo kamera, termometre | |
| ROVER2 | 1,0 kg | D 15 cm x výška 16 cm | solárne panely | dve kamery, termometer, akcelerometer. Optické a ultrafialové LED svetlá pre osvetlenie | |
| MASCOT | 9,6 kg | 29,5 × 27,5 × 19,5 cm | nenabíjateľné batérie | Kamera, infračervený spektrometer, magnetometer, rádiometer |
| MASCOT | |
| Camera (MASCAM) | Širokouhlý fotoaparát, ktorý fotografuje počas zostupu na povrch asteroidu a poskytne údaje pre prístroje na palube Hayabusa2, ako aj kontextové informácie pre prístroje na palube MASCOTu. (Institute of Planetary Research, DLR) |
| Radiometer (MARA) | Rádiometer sa používa na stanovenie povrchovej teploty s vysokým rozlíšením, ako aj na tepelné zmeny počas denných a nočných zmien na asteroide. (Institute of Planetary Research, DLR) |
| Magnetometer (MAG) | Určenie magnetického poľa asteroidu. (Institute of Geophysics and Extraterrestrial Physics, TU Braunschweig) |
| Infrared spectrometer (MicrOmega) | Stanovenie mineralogického zloženia povrchu asteroidu. (Institut d'Astrophysique Spatiale, Université Paris Sud) |
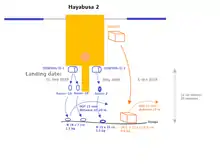
Odbery vzoriek

Samotná Hajabusa2 má naplánované tri odbery vzoriek materiálu z povrchu Ryugu a uskladní ich oddelene v uzavretom kontajnery vo vnútri návratovej kapsuly. Tri požadované vzorky sú povrchové regolity, ktoré vykazujú rysy hydratovaných minerálov, regolit s buď nepozorovateľným alebo slabým dôkazom vodných zmien a vyťaženým podpovrchovým materiálom. Minimálne požadované množstvo na jeden odber je 0,1 g, ale systém má kapacitu až 10 g na vzorku.[8]
Jeden z odberov bude z umelo vytvoreného kráteru priemeru cca 2 m, vytvoreného výbuchom. Hajabusa2 vypustí Small Carry-on Impactor (SCI), kinetickú nárazovú hlavicu pozostávajúcu z výbušného 4,5 kg detonátoru a medeného 2,5 kg projektilu. Po tom, ako bude kozmická loď v bezpečnej vzdialenosti, detonátor vypáli na povrch asteroidu projektil zo vzdialenosti cca 500 m. Dopad bude sledovať oddelená kamera DCAM3. Hajabusa2 sa na miesto kráteru pre odber vzorky vráti až po usadení prachu, po dvoch týždňoch.
22. februára 2019 sonda sa prvý krát dotkla asteroidu a vykonala odber vzoriek.[9]
11. júla 2019 sonda druhý krát odobrala vzorku blízko miesta, kam dopadol medený projektil Small Carry-on Impactor (SCI).[10] Odber do komory B sa nekonal, celkom sa vykonalo 7 zostupných operácii, zatiaľ čo komora B bola otvorená. V komorách A a C sú vzorky odobraté pri dotyku s asteroidom, komora B je prázdna, prípadne v nej môže byť materiál poletujúci okolo.
Návrat
Na konci vedeckej fázy v decembri 2019 Hayabusa2 použije svoje iónové motory na zmenu orbity a návrat na Zem. V decembri 2020 sa spätná vstupná kapsula s tromi samostatnými kontajnermi, ktoré nesú vzorky asteroidu uvoľní, aby znovu vstúpila do zemskej atmosféry rýchlosťou 12 km za sekundu, kým sonda preletí okolo Zeme. Kapsulu so vzorkami pritiahne gravitácia a pristane v testovacej oblasti Woomera v Austrálii.
Potenciálne rozšírenie misie

Keď sa v decembri 2020 kozmická loď vráti k Zemi a vypustí kapsulu so vzorkami, očakáva sa, že jej zostane 30 kg xenónovej hnacej látky, ktorá sa môže použiť na rozšírenie jej služieb a prelet k novému cieľu. Jedným z hlavných kandidátov je asteroid 2001 WR1, prelet 27. júna 2023.
Priebeh misie
Sonda odštartovala z vesmírneho centra Tanegašima 3. decembra 2014 4:22 UTC.
3. decembra 2015 uskutočnila sonda gravitačný manéver okolo Zeme vo výške 3 090 km.
27. júna 2018 došlo k blízkemu kontaktu s Ryugu.[11]
21. september 2018 pristáli Rover-1A a Rover-1B na Ryugu.[12]
3. októbra 2018 pristál MASCOT na Ryugu.[5]
22. februára 2019 sonda sa prvý krát dotkla asteroidu a vykonala odber vzoriek z povrchu asteroidu.
5. apríla 2019 sa zo sondy uvoľnil impaktor, ktorý nasledne vytvoril na povrchu asteroidu umelý kráter.
11. júla 2019 sonda zostúpila k povrchu a úspešne odobrala vzorky z vytvoreného krátera.
Referencie
- Hayabusa-2 – Spacecraft & Satellites [online]. [Cit. 2016-07-18]. Dostupné online.
- JAXA | Asteroid Explorer "Hayabusa2" [online]. . Dostupné online. (po anglicky)
- HAYABUSA2@JAXA. @haya2e_jaxa [online]. 2018-12-13, [cit. 2018-12-15]. Dostupné online. (po anglicky)
- DLR. MASCOT: Landing on an asteroid / Landung auf einem Asteroiden (Animation) [online]. 2014-11-25, [cit. 2018-09-29]. Dostupné online.
- DLR. MASCOT lands safely on asteroid Ryugu. DLR Portal. Dostupné online [cit. 2018-10-03]. (po anglicky)
- DLR. Numerous boulders, many rocks, no dust: MASCOT's zigzag course across the asteroid Ryugu. DLR Portal. Dostupné online [cit. 2018-11-29]. (po anglicky)
- JAXA | Overview of Hayabusa2 major onboard instruments [online]. . Dostupné online. (po anglicky)
- 火の鳥「はやぶさ」未来編 その4 ~ C型小惑星をもちかえる~Bringing back a C-type asteroid sample [online]. Shogo Tachibana. JAXA. 2013, [cit. 2019-02-23]. Dostupné online.
- JAXA | Hayabusa2 Latest Status, the Successful First Touchdown [online]. JAXA | Japan Aerospace Exploration Agency, [cit. 2019-02-22]. Dostupné online. (po anglicky)
- Asteroid explorer, Hayabusa2, reporter briefing [online]. JAXA Hayabusa2 Project, 25.7.2019, [cit. 2019-07-30]. Dostupné online.
- Hayabusa2 Rendezvous with Ryugu [online]. 2018-06-27, [cit. 2018-09-23]. Dostupné online.
- Japonsko potvrdilo úspěšné přistání robotů na asteroidu Ryugu. Zveřejnilo i první fotografie [online]. 2018-09-22, [cit. 2018-09-23]. Dostupné online.
Pozri aj
Externé odkazy
- Hajabusa2 na webovej stránke JAXA (po anglicky)
- Ryugu 3D model
Zdroj
- Tento článok je čiastočný alebo úplný preklad článku Hajabusa 2 na českej Wikipédii.