Plovoucí glóbus
Plovoucí glóbus je efektní bytová dekorace, elektrotechnická hračka nebo pedagogická pomůcka založená na magnetických silách, které kompenzují tíhu glóbu.[1] Ten se potom v gravitačním poli vznáší ve stabilní poloze a někdy navíc ještě rotuje. Tento jev se nazývá magnetická levitace.
Při konstrukci magnetického plovoucího glóbu je nutné vyrovnat se s inherentní nestabilitou systému permanentních magnetů v trojrozměrném prostoru. Tuto nestabilitu lze pochopit, pokud si uvědomíme, že velikost magnetické síly mezi dvěma magnety klesá s druhou mocninou jejich rostoucí vzdálenosti. Do horní části zemského glóbu (pod jeho „severní pól“) připevníme silný např. neodymový permanentní magnet a s pomocí dalšího magnetu nad glóbem se můžeme pokusit udržet glóbus ve vznosu.

Přitom najdeme rovnovážné uspořádání, kdy je tíha glóbu právě kompenzována magnetickou silou, která míří nahoru. Tato rovnováha je však labilní: Při sebemenší výchylce glóbu směrem dolů vzdálenost mezi magnety vzroste, magnetická síla se zmenší, tíha glóbu převáží – glóbus spadne. A naopak malá výchylka z rovnováhy směrem nahoru vede k vzrůstu magnetické síly, ta převáží nad tíhou a glóbus přiskočí k magnetu nad ním. Přesnější teoretické zdůvodnění tohoto jevu vychází z Earnshawova pravidla, které bylo v roce 1842 odvozeno pro elektrostatická pole, lze jej však aplikovat i na pole magnetická.[2] Takto jednoduché uspořádání tedy nemůže zajistit stabilní závěs plovoucího glóbu.
Stabilní magnetický závěs lze uskutečnit zavedením negativní zpětné vazby do tohoto systému. Ta vychází z citlivého měření polohy glóbu a pomocí magnetizačního vinutí v horním rameni nosného rámu potom moduluje magnetickou sílu tak, aby glóbus visel v požadované poloze. Stability je tedy dosaženo na úkor trvalého příkonu, který se spotřebovává v řídicím systému se zpětnou vazbou.[3][4][5] Magnetizační cívka s feromagnetickým jádrem může v závislosti na použité elektronice pracovat buď v unipolárním, nebo v bipolárním režimu. Unipolární zapojení (magnetizační proud v cívce je jen jednoho směru) je jednodušší, bipolární zapojení naproti tomu umožňuje stabilizovat glóbus v širším rozmezí vzdáleností mezi glóbem a magnetizační cívkou.[5]
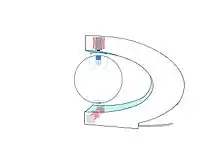
Pro snímání polohy glóbu a jeho výchylek ve vertikálním směru se obvykle používá optických prvků nebo Hallovy sondy.[4][5] Optický systém snímání polohy tvoří světelná závora. Zdrojem světla může být několik elektroluminiscenčních diod (LED) umístěných ve sloupci nad sebou po jedné straně glóbu, zatímco na protější straně je detektor světla (tvořený např. fototranzistory). Horizontálně orientovaný svazek světla je částečně odstíněn plovoucím glóbem. Výchylky jeho polohy ovlivňují množství světla dopadajícího na detektor a tím se řídí elektrický proud magnetizační cívky tak, aby se glóbus udržoval ve stabilní poloze.
Rozšířenější (a pro vnějšího pozorovatele neviditelné) je použití Hallovy sondy, která se umisťuje na spodní povrch jádra magnetizační cívky. Ta složka magnetické indukce v místě Hallovy sondy, která je generována permanentním magnetem uvnitř glóbu, závisí na vzdálenosti mezi glóbem a horním ramenem rámu. Analogový napěťový výstup z Hallovy sondy je přímo úměrný magnetické indukci, je tedy funkcí okamžité polohy glóbu a může se využít k pulzně šířkové modulaci elektrického proudu magnetizační cívky a ke stabilizaci celého systému. Jemná korekce polohy glóbu trvá asi 1 ms a tento proces se proto opakuje s frekvencí zhruba 1 kHz.[4]
K demonstraci denní rotace Země na plovoucím glóbu se využívá menšího přídavného permanentního magnetu připevněného na „jižním pólu“ glóbu.[6] Ve spodní části rámu je horizontálně orientovaný tyčový elektromagnet, který spolu s přídavným permanentním magnetem vytváří primitivní bezkartáčový motor schopný udržovat rotaci glóbu. Takový systém však nezaručuje rotaci glóbu ve „správném“ směru – tedy tak, aby pro pozorovatele na povrchu Země vycházelo Slunce na východě. Glóbus je proto po zapnutí třeba roztočit v požadovaném směru.
Reference
- TITZE, Andreas. Die schwebende Kugel [online]. Dostupné online.
- JAYAWANT, B. V. Electromagnetic suspension and levitation [online]. Printed in Great Britain: Rep. Prog. Phys., Vol. 44, 1981. Dostupné online.
- WESCOTT, Tim. Levitating Globe Teardown, Part 1 [online]. November 4, 2013. Dostupné online.
- JÜRß, Udo; RUDOLPH, Wolfgang. Völlig schwerelos! Magnet-Schweberegler mit dem ATM18 [online]. elektor, 7-8/2008. Dostupné online.
- SHAHRAMIAN, Shahriar. TSP#22 - Tutorial and Experiments on Magnetic Levitation [online]. The Signal Path (TSP), January 28, 2013. Dostupné v archivu pořízeném dne 2017-01-06.
- WESCOTT, Tim. Levitating Globe Teardown, Part 2 [online]. November 7, 2013. Dostupné online.