Magnetická levitace
Magnetická levitace nebo magnetický závěs je metoda, při níž se předmět vznáší bez jakékoliv podpory jiné, než jsou magnetická pole. Magnetické síly je přitom použito ke kompenzaci gravitačního nebo libovolného jiného zrychlení. V magnetické levitaci hrají zásadní roli dvě věci: zvedací síly směřující nahoru musí být právě tak velké, aby potlačily vliv gravitace a stabilita, která zamezí, aby systém spontánně nesklouzl nebo se nepřevrátil do takové konfigurace, která vyloučí zdvihací síly.
Zvedání
Magnetické materiály a systémy se mohou navzájem přitahovat nebo odpuzovat silou, která závisí na magnetickém poli a na ploše magnetů. Pro vyvolání magnetické levitace se v zásadě mohou použít všechny typy magnetů: permanentní magnety, elektromagnety, feromagnetika, diamagnetika, supravodivé magnety i magnetismus vyvolaný indukovanými elektrickými proudy ve vodičích. Pro výpočet síly při magnetickém nadnášení se zavádí pojem magnetického tlaku. Např. pro výpočet magnetického tlaku na supravodič platí[1]
,

kde ] je síla na jednotku plochy, je magnetická indukce těsně nad povrchem supravodiče a je permeabilita vakua.






Stabilita
Earnshawovo pravidlo ukazuje, že statický systém složený pouze z paramagnetických nebo feromagnetických materiálů nemůže v gravitačním poli stabilně levitovat[2]. Nejjednodušším příkladem odpudivé síly může být dipólový magnet umístěný v magnetickém poli jiného dipólového magnetu tak, že jsou oba magnety orientovány shodnými póly k sobě, takže síla mezi nimi oba magnety odpuzuje. Jejich odpuzování je však vysoce nestabilní. Horní magnet sklouzne na stranu nebo se přetočí, z čehož je zřejmé, že žádné takové uspořádání magnetů ke stabilitě nevede[3].
Stability však lze dosáhnout s použitím servomechanismů, diamagnetických materiálů, supravodičů nebo s takovými systémy, kde hrají roli vířivé proudy. V některých případech magnetická levitace sice dodává zvedací sílu, ale stabilitu zajišťuje nějaký typ mechanické podpory, která nese dodatečnou menší zátěž. V takovém případu mluvíme o pseudolevitaci.
Statická stabilita znamená, že jakékoliv malé vybočení ze stabilní rovnováhy vyvolá takovou výslednou sílu, která vychýlené těleso vrací do rovnovážného bodu. Síly působící v trojrozměrném prostoru na jakékoliv paramagnetické těleso v libovolné kombinaci gravitačních, elektrostatických a magnetických polí způsobí v nejlepším případě to, že poloha tělesa bude nestabilní minimálně podél jedné osy, ale může dojít k nestabilní rovnováze i podél všech os.
Existuje však několik možností, jak dosáhnout stabilní levitace, např. s využitím elektronické stabilizace nebo diamagnetických materiálů (protože jejich relativní magnetická permeabilita je menší než 1). Dá se ukázat, že diamagnetika jsou stabilní minimálně podél jedné osy, a mohou být stabilní i podél všech os. Elektrické vodiče mohou mít relativní permeabilitu v časově proměnných magnetických polích menší než 1, takže některá uspořádání založená na elektromagnetech se střídavým napájením mohou být automaticky stabilní.
O dynamické stabilitě mluvíme, když je levitující systém schopen utlumit všechny vibrační pohyby vedoucí k takovým vibračním módům, které způsobí, že předmět opustí oblast stability. Vibrace lze tlumit např. vnějším mechanickým tlumením (hydraulickým tlumičem, odporem vzduchu), tlumením vířivými proudy v elektricky vodivém materiálu, laděným tlumičem s přídavnou hmotou uvnitř levitujícího tělesa apod.
Metody
Pro úspěšnou levitaci a ovládání všech 6 os (3 translačních a 3 rotačních stupňů volnosti) lze pracovat jak s přitažlivými, tak s odpudivými silami.
Mechanické zábrany (pseudolevitace)

Pseudolevitace lze dosáhnout celkem snadno s poměrně subtilní mechanickou zábranou, která zajistí stabilitu. Dva magnety můžeme např. mechanicky omezit tak, aby se mohly pohybovat pouze podél jedné osy a současně je uspořádat tak, aby se navzájem odpuzovaly. Výsledkem bude levitace jednoho magnetu nad druhým[3]. Při jiném geometrickém uspořádání se magnety mohou přitahovat, ale jejich dotyku lze zamezit konstrukčním prvkem namáhaným v tahu (provazem, strunou, lanem). Dalším příkladem je Zippeho odstředivka vyvinutá pro obohacování uranu, jejímž klíčovým prvkem je svislý válec rychle rotující ve vakuu. V jeho horní části je magnetické ložisko a zespodu je válec mechanicky stabilizován jehlovým ložiskem.
Řízené regulační obvody
Přitažlivá síla uchyceného magnetu klesá s rostoucí vzdáleností a roste v jeho blízkosti, což vede k nestabilitě. Pro stabilizaci systému potřebujeme opak: Odchylky ze stabilní polohy musí vyvolat impulsy k návratu do původní polohy. Stabilní magnetické levitace můžeme dosáhnout tím, že budeme měřit polohu a okamžitou rychlost nadnášeného objektu a pomocí zpětnovazební smyčky vytvoříme servomechanismus, který nepřetržitě reguluje činnost jednoho elektromagnetu nebo více elektromagnetů. Ty potom korigují pohyb nadnášeného objektu požadovaným způsobem.
Mnohé systémy využívají přitažlivých magnetických sil, aby zvedaly předměty nahoru proti působení gravitace, jiné jsou založeny na kombinaci přitažlivých a odpudivých magnetických sil a tlačí nadnášený předmět zespodu vzhůru. Pokud se zabýváme paramagnetickými materiály, budeme však stále čelit inherentní nestabilitě takových uspořádání. Jednoduchým příkladem jsou různé stolní demonstrace magnetické levitace, třeba plovoucí glóby. Tyto jednoduché systémy sice nejsou příliš odolné vůči náhodným poruchám, ale princip činnosti elektromagnetického závěsu ilustrují dobře. Magneticky nadnášené vlaky jsou rovněž založeny na elektromagnetickém závěsu. Nosná část vlaku obepíná kolejnici a je nadnášena vzhůru. Řídicí systém udržuje při jízdě vlak bezpečně na konstantní vzdálenosti od koleje[4].
Indukované proudy
Tyto systémy fungují na základě odpuzování podle Lenzova zákona. Jestliže je vodič vystaven časově proměnnému magnetickému poli, indukují se v něm takové elektrické proudy, které vytvářejí magnetické pole vyvolávající odpuzování. Pro systémy tohoto typu je typická inherentní stabilita, i když v některých případech ještě vyžadují dodatečné tlumení.
Relativní pohyb vodičů vůči magnetům. Jestliže v blízkosti magnetu pohybujeme dobrým elektrickým vodičem (měď, hliník, stříbro, …) napříč siločarám magnetického pole, indukují se ve vodiči vířivé proudy. Tyto vířivé proudy jsou takového druhu, že odporují změnám, které je vyvolaly – to vede ke vzájemnému odpuzování vodiče a magnetu. Při dostatečně vysoké rychlosti pohybu je odpudivá síla tak velká, že dojde k nadnášení vodiče nad magnetem nebo naopak k nadnášení pohybujícího se magnetu nad vodivou podložkou. Vodič ve formě vysokofrekvenčního lanka („licny“) zhotoveného z drátků tenčích než je hloubka proniknutí při skinefektu přitom funguje mnohem lépe než masivní vodiče.

Technicky zvlášť zajímavé je v tomto případu použití Halbachovy soustavy magnetů místo jednoduchého permanentního magnetu, protože Halbachova soustava téměř zdvojnásobuje intenzitu magnetického pole, což zase téměř zdvojnásobuje intenzitu vířivých proudů. Výsledkem je více než trojnásobná zdvihací síla. Halbachovy soustavy magnetů se také dobře hodí pro magnetickou levitaci a stabilizaci gyroskopů a hřídelí elektrických motorů a generátorů.
Časově proměnná elektromagnetická pole. Vodič se může vznášet nad elektromagnetem (nebo naopak elektromagnet nad vodičem), který je napájen střídavým proudem. To proto, že jakýkoliv běžný vodič se v důsledku vířivých proudů generovaných uvnitř tohoto vodiče chová jako diamagnetický materiál. Vířivé proudy vytvářejí své vlastní magnetické pole, které se snaží zeslabit původní magnetické pole. Většina jeho magnetických siločar do vodiče neproniká a vodič je od elektromagnetu odpuzován. Tento jev vyžaduje dobře vodivý, ale neferomagnetický materiál (např. hliník nebo měď), protože feromagnetika jsou k elektromagnetu současně také silně přitahována, i když vířivé proudy v nich mají odpudivý efekt. I zde lze nejlepších výsledků dosáhnout s vodiči typu vysokofrekvenčního lanka. Využít se toho dá např. pro kouzelnické triky jako je třeba levitace telefonního seznamu, v němž je ukryta hliníková deska. Jinými příklady jsou bezkontaktní tavení kovů nebo aplikace lineárních indukčních motorů pro nadnášení i pohon.
Diamagneticky stabilizované nadnášení
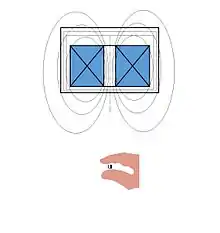
Earnshawovo pravidlo se na diamagnetika nevztahuje. Ta se ve srovnání s běžnými magnety chovají opačně vzhledem ke své relativní permeabilitě μr < 1 (to znamená ke své záporné magnetické susceptibilitě). Diamagnetická levitace může být inherentně stabilní. Permanentní magnet může být stabilně nadnášen různými konfiguracemi permanentních magnetů a diamagnetických materiálů. Dokonce i slabý diamagnetismus vody obsažené v prstech lidské ruky dokáže stabilizovat permanentní magnet zavěšený v rozptylovém magnetickém poli pod supravodivým magnetem[5].
Diamagnetické látky magnetická pole vytěsňují. Diamagnetismus je obecnou vlastností všech materiálů, ale jeho projevy jsou obvykle velmi slabé a často bývají překryty mnohem silnějšími paramagnetickými či feromagnetickými charakteristikami materiálů, které se ve vnějším magnetickém poli chovají právě opačně. Pokud však v nějakém materiálu diamagnetismus převládá, pak je takový materiál od magnetu odpuzován.

Diamagnetismus se uplatňuje při nadnášení lehkých kousků pyrolytického grafitu nebo vizmutu nad permanentními magnety. Jelikož je voda převážně diamagnetická, je tato technika použitelná i pro levitaci vodních kapek a rovněž živých zvířat jako např. luční kobylky, žáby nebo myši.[6] Magnetická pole vyžadovaná pro takové experimenty jsou však velmi vysoká, typicky kolem 16 T, což může být problematické v případě výskytu feromagnetických předmětů v blízkosti takového experimentálního zařízení.
Konkurující si síly při diamagnetické levitaci popisuje rovnice
,

kde je magnetická susceptibilita, je hustota materiálu, je lokální gravitační zrychlení (na Zemi ), je permeabilita vakua, je magnetická indukce, a je změna magnetické indukce podél svislé osy z. Předpokládáme-li ideální podmínky pro průběh magnetické indukce podél osy z solenoidu, bude







voda levitovat při



a grafit bude levitovat při .

Supravodiče

Supravodiče I. druhu jsou perfektními diamagnetiky, která dík Meissnerovu jevu úplně vytěsňují magnetická pole ze svého objemu. Jejich levitaci lze tedy chápat jako zvláštní případ levitace diamagnetika.
Do supravodičů II. druhu však za určitých podmínek magnetické pole částečně proniká podél tzv. vírů, ve kterých je kvantován magnetický tok. Víry jsou vlákna nesupravodivého materiálu obklopeného supravodivou složkou a ve stavu termodynamické rovnováhy zaujímají strukturu hexagonální vírové mřížky[7]. Důležitou roli přitom hraje zachytávání či kotvení vírové mřížky (flux pinning) na různých nehomogenitách materiálu. A právě toto zachytávání vírové mřížky přispívá ke stabilizaci při levitaci magnetu nad podložkou ze supravodiče II. druhu, protože působí proti vzájemnému pohybu mezi supravodičem a magnetickým polem. Totéž ovšem platí i v obráceném případu při levitaci supravodiče nad magnetickou podložkou.
Tato pravidla se uplatňují při elektrodynamickém nadnášení v supravodivých ložiskách, setrvačnících apod. Pro nadnášení vlaků je nutné velmi silné magnetické pole. Supravodivý magneticky nadnášený vlak k tomu využívá supravodivé solenoidy uvnitř vozů, ale jeho nadnášení nesouvisí s Meissnerovým jevem.
Rotační stabilizace
Magnet (nebo vhodně uspořádané seskupení magnetů) vytvářející toroidní pole může v gravitačním poli stabilně levitovat, když je gyroskopicky stabilizován svou rotací v dalším toroidním poli, které generuje prstencový magnet pod ním. Funguje to však jen když je rychlost precesního pohybu uvnitř intervalu mezi spodní a horní kritickou hranicí. Oblast stability je dost úzká jak prostorově, tak i s ohledem na požadovanou rychlost precese. Tento jev poprvé objevil Roy M. Harrigan a v roce 1983 si na tomto základu patentoval přístroj pro magnetickou levitaci. Následně bylo s odvoláním na tento patent vyvinuto několik přístrojů využívajících rotační stabilizace, jako je např. populární Levitron. Pro nekomerční výzkumné účely dále vzniklo několik takových přístrojů v univerzitních laboratořích. Ty jsou však založeny na magnetech příliš výkonných na to, aby se jimi bezpečně zabývala širší veřejnost.
Využití
Magnetické levitace se využívá při bezkontaktním tavení, v magnetických ložiscích, v některých aerodynamických tunelech, v magneticky nadnášených vlacích a pro vystavování některých výrobků.

Technika bezkontaktního tavení se rozvíjela po roce 1950. Při frekvencích řádu desítek kHz a výkonech několika kW lze nadnášet menší množství kovu a ohřevem vířivými proudy dosáhnout během levitace tavení bez rizika znečistění taveného kovu tavicím kelímkem. V nejjednodušším uspořádání má indukční cívka tvar kuželu a je zhotovena z kovové trubky, kterou protéká chladicí kapalina. Použít se může i ochranná atmosféra[8].
V magnetickém ložisku[9] je mechanická zátěž podchycena magnetickou levitací a pohyblivé součásti se proto vzájemně nedotýkají. To vede k velmi nízkému tření, eliminuje se mechanické opotřebení materiálů a ložisku to dovoluje velmi vysoké rychlosti otáčení. Pasívní magnetická ložiska jsou založena na permanentních magnetech, nevyžadují žádný příkon pro stabilizaci, ale jejich konstrukce je obtížná s ohledem na omezení daná Earnshawovým pravidlem.
Většina magnetických ložisek je proto aktivního typu, používají elektromagnety, při provozu vyžadují trvalý příkon a aktivní řídicí systém s polohovými čidly zabezpečující stabilitu[10]. Magnetická ložiska můžeme najít v některých průmyslových aplikacích jako např. v elektrických generátorech, v ropných rafineriích a při zpracování zemního plynu, v Zippeho odstředivkách pro obohacování uranu nebo v turbomolekulárních vývěvách.


Magnetická levitace modelů ofukovaných v aerodynamických tunelech je sice atraktivní, ale obecně rozšířena není. I když by magnetický závěs modelu bez mechanické opory usnadnil získat údaje bližší reálnému provozu letadel (nebo i pozemních vozidel), jsou zde i mnohé nedořešené problémy[11]. S ohledem na hmotnost a rozměry modelů je nezbytné generovat intenzivní magnetická pole v poměrně velkém objemu – tedy použít buď supravodivé solenoidy v kryostatech s kapalným héliem, nebo pracovat s klasickými elektromagnety a platit za to enormně vysokou spotřebou elektrické energie. Další potíží může být interference mezi magnetickým polem a vysokofrekvenčními signály při bezkontaktním sběru měřicích údajů.
Pro vlaky nadnášené magnetickými silami se ujalo označení Maglev (zkratka: magnetic levitation), i když se aplikace magnetické levitace netýkají pouze vlaků. Magneticky nadnášené vlaky se pohybují podél vodicí dráhy a magnetické systémy přitom zajišťují jak zvedací tak i pohonné síly[12]. Výrazně se tím snižuje tření a tento systém umožňuje dosahovat vysokých přepravních rychlostí[13]. Pohyb vlaku je ve srovnání s klasickou kolejovou dopravou plynulý a tichý. Vlaky Maglev se vyznačují vysokou pořizovací cenou, ale relativně nízkými provozními náklady. Tento typ dopravy je dnes v pravidelném provozu pouze ve třech státech: Japonsko, Čína, Jižní Korea.
Reference
V tomto článku byly použity překlady textů z článků Magnetic levitation na anglické Wikipedii a Lewitacja magnetyczna na polské Wikipedii.
- ZBOROWSKI, Maciej; MOORE, Lee R.; WILLIAMS, P. Stephen, Jeffrey J. Chalmers. Magnetic Pressure as a Scalar Representation of Field Effects in Magnetic Suspensions [online]. AIP Conf Proc., 2010. Dostupné online.
- SCHARLAU, Bernd; NORDMEIER, Volkhard; SCHLICHTING, H. Joachim. Magnetische Levitation [online]. Augsburg: Deutsche Physikalische Gesellschaft: Didaktik der Physik., 2003. Dostupné online.
- CRUSIUS, Kai. Magnetische Levitation und alternative Aspekte des Magnetismus im Physikunterricht [online]. JOHANNES GUTENBERG-UNIVERSITÄT MAINZ, INSTITUT FÜR PHYSIK, Juni 2006. Dostupné v archivu pořízeném dne 2017-02-11.
- Magnetic Levitation Principles [online]. Massachusetts, USA: Engineering Matters, Inc.. Dostupné online.
- SIMON, M. D.; HEFLINGER, L. O.; GEIM, A. K. Diamagnetically stabilized magnet levitation. S. 702–713. Am. J. Phys. 69 (6) [online]. June 2001. S. 702–713. Dostupné online.
- SIMON, M. D.; GEIM, A. K. Diamagnetic levitation: Flying frogs and floating magnets. S. 6200–6204. JOURNAL OF APPLIED PHYSICS [online]. American Institute of Physics, 1 MAY 2000. Roč. 87, čís. 9, s. 6200–6204. Dostupné online.
- DANIŠ, Stanislav. 9 let vysokoteplotní supravodivosti. S. 197 – 214. Pokroky matematiky, fyziky a astronomie [online]. Ročník 41 (1996), č. 4. S. 197 – 214. Dostupné online.
- NORDINE, Paul C.; WEBER, J. K. Richard; ABADIE, Johan G. Properties of high-temperature melts using levitation. S. 2127–2136. Pure Appl. Chem. [online]. 2000. Roč. Vol. 72, čís. No. 11, s. 2127–2136. Dostupné online.
- LEMBKE, Torbjörn A. Design and Analysis of a Novel Low Loss Homopolar Electrodynamic Bearing. Doctoral Dissertation [online]. Stockholm: Electrical Machines and Power Electronics at the Royal Institute of Technology in Stockholm, 2005. Dostupné online.
- SCHWEITZER, G. Active magnetic bearings - chances and limitations [online]. 2002. Dostupné online.
- ISENMANN, Ralf (Project coordinator). Wind tunnel technology roadmap and analysis of the innovations within the field [online]. Karlsruhe (Germany): Fraunhofer Institute for Systems and Innovation Research ISI, August 2010. Dostupné online.
- ThysenKrupp Transrapid GmbH [online]. Dostupné v archivu pořízeném dne 2013-09-27.
- Japan's maglev train breaks world speed record with 600km/h test run [online]. Dostupné online.