Shodné zobrazení
Shodné zobrazení je v geometrii takové zobrazení mezi Euklidovskými prostory, které zachovává vzdálenost.
Shodné zobrazení prostoru do sebe se nazývá shodnost.
V elementární školské geometrii se studují shodnosti v rovině a (trojrozměrném) prostoru.
Abstraktně se pro metrické prostory zavádí pojem izometrické zobrazení (izometrie).
Základní vlastnosti
- Složením shodných zobrazení vznikne opět shodné zobrazení.
- Shodné zobrazení je prosté.
- Pro každé shodné zobrazení je inverzní zobrazení opět shodné.
- Identita je shodné zobrazení.
- Všechny shodnosti euklidovského prostoru tvoří s operací skládání zobrazení grupu shodností, tzv. euklidovskou grupu.
Shodnosti v rovině
Druhy shodností
V rovině existují jenom následující druhy shodností:
- posunutí (translace) - všechny body roviny jsou posunuty stejným směrem o stejnou vzdálenost - směr a vzdálenost jsou dány orientovanou úsečkou nebo vektorem posunutí.
- otočení (rotace) - všechny body roviny jsou otočeny kolem pevně daného bodu (středu otočení) stejným směrem o stejný úhel (úhel otočení)
- středová souměrnost (středová symetrie) - středová souměrnost v rovině je zvláštní případ otočení - otočení kolem středu souměrnosti o 180 stupňů
- totožnost (identita) - zobrazení, které každý bod zobrazuje na sebe sama. Lze ji považovat za posunutí o úsečku nulové délky nebo za otočení o nulový úhel.
- osová souměrnost (zrcadlení, osová symetrie)
- posunutá (osová) souměrnost - složení osové souměrnosti a posunutí ve směru osy.



Skládání shodností
- Složením (dvou) posunutí je opět posunutí.
- Složením dvou středových souměrností je posunutí.
- Složením dvou otočení se stejným středem je opět otočení se stejným středem.
- Složením dvou osových souměrností se stejnou osou je identita.
- Složením dvou osových souměrností s různými rovnoběžnými osami je posunutí. Každé posunutí lze vyjádřit jako složení dvou osových souměrností.
- Složením dvou osových souměrností s různoběžnými osami je otočení kolem průsečíku os. Každé otočení lze vyjádřit jako složení dvou osových souměrností.
- Inverzní zobrazení ke shodnému zobrazení je stejného typu, jako původní zobrazení (například inverzním zobrazením k posunutí je opět posunutí).
Každou shodnost v rovině lze složit (různými způsoby) nejvýše ze tří osových souměrností. Obecně každou shodnost v n-rozměrném euklidovském prostoru lze složit nejvýše z (n+1) souměrností podle nadroviny (zrcadlení generují euklidovskou grupu).
Přímá a nepřímá shodnost
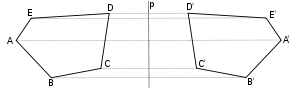
Při pokusech se zobrazením trojúhelníku v různých shodnostech si nelze nevšimnout jedné zajímavé věci - někdy jsou vrcholy obrazu trojúhelníku „pojmenovány“ ve stejném směru (například A,B,C po směru hodinových ručiček se zobrazí na A′,B′,C′ opět po směru hodinových ručiček), někdy naopak (vzor je A,B,C po směru, ale obraz je A′,B′,C′ proti směru). Mluvíme o zachování orientace a o shodném zobrazení zachovávajícím orientaci nebo naopak o změně orientace a o shodném zobrazení měnícím orientaci.
Shodnost zachovávající orientaci se nazývá přímá neboli přemístění. Shodnost měnící orientaci se nazývá nepřímá.
- Posunutí a otočení (a tedy i středová souměrnost) jsou přímé shodnosti (přemístění), zachovávají orientaci.
- (Posunuté) osové souměrnosti jsou nepřímé shodnosti, mění orientaci.
Každé přemístění v rovině lze složit (různými způsoby) ze dvou osových souměrností.
- Složením (dvou) přímých shodností je přímá shodnost.
- Složením přímé a nepřímé shodnosti je nepřímá shodnost.
- Složením dvou nepřímých shodností je přímá shodnost.
- Složením sudého počtu nepřímých shodností je přímá shodnost.
- Složením lichého počtu nepřímých shodností je nepřímá shodnost.
Shodnosti v prostoru
Druhy shodností
V prostoru existují jenom následující druhy shodností:
- posunutí (translace) - všechny body prostoru jsou posunuty stejným směrem o stejnou vzdálenost - směr a vzdálenost jsou dány orientovanou úsečkou nebo vektorem posunutí.
- otočení (rotace) - všechny body roviny jsou otočeny kolem pevně dané přímky (osy otočení, rotační osy) stejným směrem o stejný úhel (úhel otočení)
- rovinová souměrnost (zrcadlení)
- středová souměrnost (prostorová inverze) - na rozdíl od rovinné středové souměrnosti nelze realizovat jako složení 2 rotací
- totožnost (identita) - zobrazení, které každý bod zobrazuje na sebe sama. Lze ji považovat za posunutí o úsečku nulové délky nebo za otočení o nulový úhel.
- a jejich netriviální složení.