Sériový elektromotor
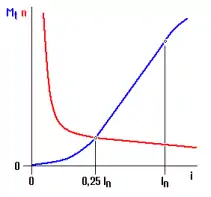
Sériový elektromotor je elektromotor, ve kterém je budící vinutí zapojeno v sérii s vinutím kotvy. Výhodnou vlastností tohoto stroje je, že umí pracovat jak na stejnosměrné, tak i na střídavé napětí. Tento stroj se uplatnil zvláště k pohonu nejrůznějších zařízení, zejména dopravních prostředků a nástrojů. Využití tohoto stroje v menším měřítku je např. u domácích spotřebičů (vrtačky, vysavače). Jeho přirozená charakteristika je podobná hyperbole s vodorovnou asymptotou pod osou X - při malých otáčkách dosahuje značného točivého momentu, který se zvýšením otáček klesá k nule.
Úvod
Rozjezd se prováděl přepojováním odboček rozjezdového odporníku. Protože tento způsob byl velmi nehospodárný, přešlo se na regulaci tyristorovou, která (podle délky pulsu v periodě střídavého proudu) propouští volitelné množství energie. Brzdění bylo nemyslitelné, protože při rozpojení svorek stroje ztratil tento okamžitě i buzení (zakázaný stav), takže se v kotvě neindukoval žádný proud. Tento problém byl vyřešen brzděním do odporu přes tyristor, kdy za využití samonabuzení stroje se indukovaný proud mařil v odpornících, dalším způsobem je rekuperace energie přes kondenzátor zpět do napájecí sítě.
Stejnosměrný sériový motor
Charakteristika vlastností sériového motoru:
- a) zátěžově výhodná otáčková charakteristika, kdy s poklesem otáček (při zatížení) vzrůstá točivý moment
- b) průběh otáčkové charakteristiky umožňuje spolupráci více motorů v sériovém, sériově-paralelním zapojení
- c) má nejvyšší točivý moment v závislosti na proudu
- d) je odolný proti skokové změně napětí, kdy v sérii s kotvou je zařazena indukčnost hlavních pólů, proudový náraz je omezen vzrůstem indukovaného napětí kotvy při zesílení pole statoru
mag. pole statoru odbočkami vinutí
mag. pole statoru paral. odporem
proudu kotvy paralelním odporem
Momentová charakteristika
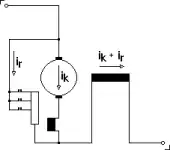
- Točivý moment je dán obecným vztahem: Mt = K × Φ × Ik (Mt = točivý moment, K = konstanta motoru, Φ = magnetický tok buzení, Ik = proud kotvy)
- Magnetický tok však není stálý, je závislý na proudu, závislost není lineární. Pro přibližné řešení je průběh momentu stanoven takto:
- I < 25 % In – za tohoto stavu je železo magnetického toku slabě nasyceno, předpokládáme, že tok je úměrný proudu, tedy Φ ≈ I. V tomto případě má točivý moment parabolický průběh podle vztahu Mt = K × I2.
- 25 % In < I < In – zde Φ = konst., průběh momentu motoru je přímkový.
- I > In – při přetížení již moment motoru vlivem ztrát není přímkový ale nižší.
Otáčková charakteristika
- Otáčky motoru jsou určeny základní rovnicí rovnováhy napětí: U = ui + R × i (U = svorkové napětí, ui = indukované napětí při zatížení, R = odpor motoru, i = proud motoru, kotvy)
- Otáčkovou charakteristiku je možno vyjádřit dvěma způsoby:
- n = f(I) – jako závislost otáček na proudu
- n = f(M) – jako závislost otáček na momentu
- Charakteristika otáček:
- I < 25 % In – v této oblasti jsou otáčky značně závislé na momentu, křivka se blíží tvaru klesající hyperboly se zvyšováním proudu
- 25 % In < I – jakmile se železo nasytí a magnetický tok statoru je konstantní, křivka se blíží klesající přímce se zvyšováním proudu
- Výsledný vztah pro otáčky motoru v ustálením stavu: n = (U - Rk × ik) / (k × Φ), je však potřeba brát v úvahu následující:
- a) zvetší-li se zatížení, musí poklesnout otáčky motoru tak, aby rozdíl svorkového napětí a vnitřního napětí protlačil motorem větší proud, který odpovídá většímu zatěžovacímu momentu
- b) vzroste-li proud kotvy, vzroste i buzení statoru (kotva je zapojena do série s vinutím statoru)
- c) pokud se zvětšuje tok statoru, mělo by se taktéž zvětšovat indukované napětí kotvy, což je však v rozporu s bodem a)
- Závěr: Aby motorem protékal proud odpovídající požadovanému momentu, musí se zvětšení toku (způsobené zvýšením proudu) vyrovnat poklesem otáček, opačně při odlehčení motoru.
Regulace otáček
- Otáčky kotvy jsou přímo úměrné napětí kotvy motoru a nepřímo úměrné velikosti magnetického toku (viz výše). Z tohoto vyplývají i možnosti regulace.
- Změnou napětí
- a) změnou napájecího napětí, např. z řízeného zdroje
- b) změnou řazení motorů (do série)
- c) zařazením (vložení) předřadných odporů
- Změnou (zeslabením) magnetického toku statoru (zvýšení otáček)
- a) odbočkami ve statorovém vinutí
- b) připojením paralelního odporu k vinutí statoru
- Změnou proudu kotvy paralelním odporem (snížení otáček)
- a) zvýší se proud statoru
- b) sníží se napětí na kotvě
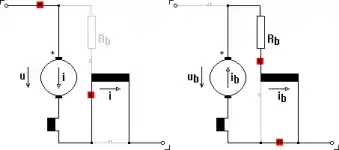
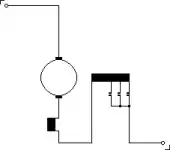
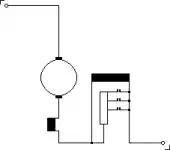
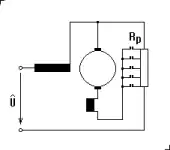
(vlevo zapojení pro motor, vpravo zapojení pro brzdu)
Elektrodynamické brzdění
- V tomto režimu je motor zapojen jako generátor pracující do odporové zátěže nebo do sítě (rekuperace). Podle buzení motoru se jedná o brzdění motoru s vlastním buzením (sériový motor) nebo s cizím buzením.
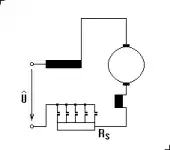
- Brzdění do odporníků se sériovým buzením:
- Motor je odpojen od sítě a připojen na brzdový odporník, v prvním okamžiku protéká obvodem proud daný pouze remanentním magnetismem. Brzdění do odporníků s vlastním buzením je sice jednoduché, ale má následující nevýhody: citlivost na odpor obvodu, přetěžování motoru, brzdná síla se mění v určitém rozmezí a přitom je závislá na rychlosti.
- Brzdění do odporníků s cizím buzením:
- Vinutí statoru se při brzdění napájí z vnějšího zdroje (síť, baterie, budič, měnič …). Budící proud je možno regulovat tak, aby brzdná síla byla stálá a nedocházelo k přetěžování motorů zvýšeným napětím nebo proudem. Nabuzení motorů je rychlé.
- Rekuperační brzdění:
- Pro rekuperační brzdění je možno použít pouze motory s cizím buzením, protože charakteristika sériového motoru je nevýhodná. Před připojením na síť (do které se provádí rekuperace) musí mít motor o málo vyšší napětí, aby proud protékal do sítě. Rekuperační brzdění je možné pouze tehdy, je-li v síti odběr (zatížená síť) aby bylo možno výkon vzniklý při brzdění přenést do jiného zařízení. V opačném případě se musí přejít na brzdění do odporníků. Taktéž rozsah brzdění rekuperací je menší než u brzdění do odporníků, protože při malých otáčkách napětí na kotvě již nepřesáhne napětí sítě.
Stejnosměrný sériový trakční motor
Stejnosměrný sériový motor je nejčastějším typem trakčního motoru. Používá se ve vozidlech s elektrickým pohonem (elektrické lokomotivy, tramvaje, trolejbusy, vozidla metra, motorové lokomotivy a motorové vozy s elektrickým přenosem výkonu, apod.). Pro funkci motoru v trakčním režimu jsou potřebné následující funkce (podle konkrétní aplikace):
Změna smyslu otáčení (reverzace)
- Změna smyslu otáčení se provede přepojením kotvy nebo přepojením vinutí statoru (ne současně). Tímto dojde ke změně orientace magnetického toku a tím i ke změně otáčení. Pokud se trakčními motory brzdí, je nutno přepínat kotvu motoru (nelze ani krátkodobě odbudit stator).
Změna řazení motorů
- Podle počtu trakčních motorů (zpravidla 4 nebo 6) je možno realizovat dva nebo tři stupně vzájemného řazení motorů. Při napájení trakce: 3kV= nelze použít čistě paralelního zapojení motorů (Un = 1,5kV) a musí se pracovat se skupinami motorů. Změna přepojení řazení probíhá ve 2–3 po sobě jdoucích krocích. Pro změnu řazení je možno použít následující řešení:
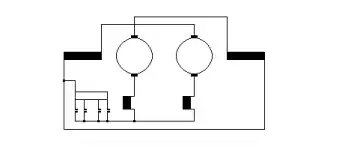
- Změna řazení s motorem (skupinou) nakrátko:
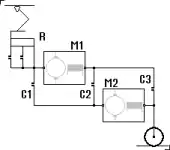
- Na hospodárném stupni sériového zapojení skupin motorů, je sepnut stykač [C2] a rozjezdový odporník je vyřazen. Před zahájením přechodu na paralelní zapojení skupin je nutno zařadit část rozjezdového odporníku, aby nedošlo k proudovému nárazu při spojení motoru [M2] nakrátko, protože by motor [M1] dostal plné napětí. Sepnutím stykače [C3] se spojí druhý motor nakrátko, odbudí se a a jeho moment klesne na nulu. Tažná síla lokomotivy se sníží na polovinu protože pracuje jen motor [M1]. Následně může rozepnout stykač [C2], který propojoval oba motory do série, motor [M2] pracuje ještě naprázdno. Teprve po sepnutí stykače [C1] je opět motor [M2] připojen a oba motory pracují paralelně.
- Poznámka: Při čtyřech nebo šesti motorech se skupina nahradí dvěma nebo třemi motory. Při zkratování motoru projde motorem proud, který je dán indukovaným napětím v remanentním poli, proud se musí omezit odporníkem. Tento způsob změny zapojení je jednoduchý, pokles tažné síly při změně zapojení se však projevuje rozjezdovými rázy.
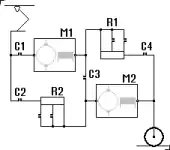
- Změna řazení můstkovým zapojením
- Motory a odporníky jsou zapojeny do Wheatstoneova můstku, kde jsou vloženy ovládací stykače kombinace. Při sériovém zapojení jsou sepnuty stykače [C1] a [C3] a oba motory nebo skupiny jsou připojeny přímo na síť. Před zahájením změny zapojení je nutno změnit hodnotu odporníků [R1] a [R2] na takovou hodnotu, aby odpovídala následnému paralelnímu řazení. Spojením stykače [C2] a [C4] se spojí obě skupiny paralelně ale sériové spojení ještě trvá. Teprve po rozpojení stykače [C3] se zruší sériové spojení motorů (skupin) a motory jsou zapojeny paralelně. V dalších stupních se postupně vyřazují odporníky [R1] a [R2].
- Poznámka: Při můstkovém přechodu zůstávají oba motory nebo skupiny stále v činnosti a proto nedochází k poklesu tažné síly, obvod je však složitější z důvodu dvojích odporníků.
- Motory a odporníky jsou zapojeny do Wheatstoneova můstku, kde jsou vloženy ovládací stykače kombinace. Při sériovém zapojení jsou sepnuty stykače [C1] a [C3] a oba motory nebo skupiny jsou připojeny přímo na síť. Před zahájením změny zapojení je nutno změnit hodnotu odporníků [R1] a [R2] na takovou hodnotu, aby odpovídala následnému paralelnímu řazení. Spojením stykače [C2] a [C4] se spojí obě skupiny paralelně ale sériové spojení ještě trvá. Teprve po rozpojení stykače [C3] se zruší sériové spojení motorů (skupin) a motory jsou zapojeny paralelně. V dalších stupních se postupně vyřazují odporníky [R1] a [R2].
Řazení odporníků a šuntování
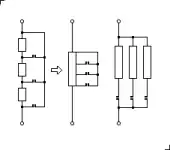
- Řazení odporníků pro změnu otáček a nebo omezení proudu motoru nebo vinutí statoru je možno realizovat postupným spínáním nebo odpojováním odboček odporníku. Z principu změnu hodnoty odporu se používá řazení odporníků následující:
- a) sériové řazení
- b) paralelní řazení
- c) sério-paralelní řazení (využívá výhod obou předchozích)
- Při zeslabování magnetického pole přepínáním odboček vinutí obvod nemění, při šuntování se podstatně mění celý elektrický obvod. Při použití pouze odporového šuntu se změní indukčnost motoru a při změně trolejového napětí a při spínacích pochodech dojde k nežádoucím přechodovým jevům (prudký nárůst proudu). Během trvání přechodového jevu neodpovídá rozdělení proudu mezi vinutí statoru a šuntovací odporník žádanému rozdělení. Z tohoto důvodu je v sérii se šuntovacím odporníkem zařazena tlumivka, která omezuje skokové změny proudu. Obě větve, tedy vinutí statoru a šuntovací odpor, jsou vyrovnané a přechodové děje mají přibližně stejný průběh.
Stabilita při elektrodynamickém brzdění
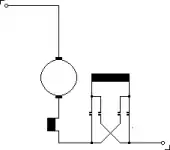
- Při elektrodynamickém brzdění jednoho motoru se nevyskytují dynamické potíže. Při dvou a více motorech, pracujících v režimu elektrodynamickém brzdění, je potřeba zaručit stejný brzdný výkon všech motorů, zamezit prokluzu a nebo otáčení proti smyslu jízdy (inverzní prokluz). Řešením je použití vyrovnávacích spojek kotev motorů nebo křížovým zapojením, kdy je kotva jednoho motoru propojena s vinutím statoru druhého motoru a naopak (zapojení je možno aplikovat i na větší počet motorů).
Skluz
- Skluz je stav, kdy některá kola nebo dvojkolí vozidla ztratí adhezní kontakt s kolejnicí (vozovkou) a začnou se otáčet obvodovou rychlostí různou od rychlosti vozidla. U sériových motorů, zejména pokud je zapojeno několik motorů do série s předřazeným rozjezdovým odporníkem, je skluz velmi nebezpečný. V tomto případě mohou otáčky motoru dosáhnout kritických hodnot s ohledem na mechanickou konstrukci motoru. Dalším negativním jevem při prokluzu může být i přejiskření, kdy motor na sebe (vlivem zvýšených otáček) převezme větší část napětí ostatních sériově zapojených motorů. Pro zamezení následků tohoto jevu se používají skluzové ochrany. Pro detekci skluzu se hledala řešení, která rozeznají nežádoucí změnu otáček motoru nebo skupiny motorů. První řešení pracovala s tzv. skluzovými relé, pracujícími na principu detekce změny proudu v obvodu při odlehčení (skluzu) motoru. Moderní a přesnější řešení pracují se zpětnou kontrolou otáček mezi dvojkolími.
Sériový trakční motor na zvlněný proud
Usměrněním jednofázového střídavého proudu s kmitočtem 50 Hz získáme stejnosměrný zvlněný proud. I při vyhlazení proudového průběhu tlumivkami a i indukčnostmi obvodu, zůstává poměrně velká vlnitá složka. Průběh proudu je dán tvarem usměrněného napětí a indukčnosti obvodu. Vlnitý proud má dvě složky: stejnosměrnou a střídavou o kmitočtu 100 Hz, která nemusí být stálá, hlavně v případech regulace odbočkami z transformátoru.
Pokud by byl klasický sériový motor napájen tímto proudem, pracoval by s nižší účinností, s větším oteplením (způsobeným vířivými proudy, hysterezí) a horší komutací. Zhoršení komutace způsobí jednak transformace napětí do komutujících cívek (tok hlavních pólů má střídavou složku), jednak fázový posuv pulsující složky komutačního pole.
Sériový trakční motor na zvlněný proud musí být proto následovně upraven:
- a) trvalé připojení odporníků (šuntů) k vinutí hlavních pólů (až 97% střídavé složky projde šuntem, což je téměř ideální odpor)
- b) úpravou konstrukce motoru tak, že je magnetický obvod částečně nebo celý složen z plechů (jádra hlavních a komutačních pólů a část jha)
Jednofázový (střídavý) sériový motor (komutátorový motor)
Tento motor může pracovat jak se stejnosměrným tak i se střídavým proudem. V zásadě se jedná o konstrukci jako u stejnosměrného motoru, kotva má normální stejnosměrné vinutí a komutátor. Vzhledem k tomu, že obvodem prochází střídavý magnetický tok, musí být i stator složen z plechů. Vinutí statoru je uloženo na vyniklých pólech.
Motory jsou stavěny na malé a menší výkony ale vysoké otáčky, kdy pracují s dobrým účiníkem. Pokud pracuje motor na stejnosměrný proud, má motor lepší účinnost a trochu vyšší otáčky.
Regulace otáček
- Regulaci otáček je možno provádět sériovým odporníkem nebo paralelním odporníkem. Při druhém způsobu se mění napětí kotvy, magnetický tok statoru je však stejný (motor je tak „tvrdší“ a blíží se motoru derivačnímu). Výhodnější je však měnit otáčky změnou napětí z regulačního transformátoru nebo pulsní regulací.
Jednofázový (střídavý) sériový trakční motor
Z konstrukčního pohledu se střídavý trakční motor liší od stejnosměrného v následujících bodech:
- a) magnetický obvod musí být složen z plechů
- b) stator nemá vyniklé póly, vinutí hlavních a komutačních pólů a kompenzační vinutí je uloženo v drážkách statoru
- c) motor má velký počet pólů, podle výkonu až 14
- d) kartáče musí být úzké, aby současně docházelo ke komutaci na co nejmenším počtu cívek
- e) počet cívek kotvy a lamel je velký, lamely jsou úzké
- f) motor pracuje s relativně nízkým napětím a sníženým kmitočtem (16 2/3 Hz, 25 Hz)
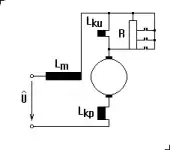
- Popis k obrázku: [Lm] – hlavní vinutí, [Lku] – komutační vinutí, [Lkp] – kompenzační vinutí
Komutace
- Dosažení dobré komutace je složitější než u stejnosměrného motoru. Teprve Behn-Eschenburgův vynález komutačních pólů umožnil využití jednofázových sériových motorů pro vyšší výkony, zejména jako trakčních motorů na železnici. V komutující cívce se mění směr proudu a doba komutace je značně kratší než perioda střídavého proudu. Průběh komutace není na všech cívkách stejný, protože ke komutaci dochází v různých okamžitých hodnotách střídavého proudu a není ani stejné reaktanční napětí. Reaktanční napětí je možno částečně potlačit komutačními póly.
- Komutující cívka je uložena kolmo na tok statoru a indukuje se v ní transformační indukované napětí, zpožděné o 90° za tokem statoru.
- Transformační napětí zhoršuje komutaci a je omezujícím činitelem při konstrukci motoru:
- a) transformační napětí nesmí být vyšší než 3 V
- b) transformační napětí je úměrné toku pólu a kmitočtu střídavého proudu
- Z tohoto vyplývají následující potřeby:
- a) velký počet pólů u strojů velkého výkonu
- b) snížení kmitočtu, aby se zvýšil výkon na jeden pól (snížením kmitočtu na 1/3 se zvýší výkon na pól 3×)
- V okamžiku záběru není možno transformační napětí kompenzovat. Při otáčení kotvy je transformační napětí kompenzováno napětím, indukovaným polem pomocných pólů. Pro dosažení optimálního stavu komutace je ke komutačnímu vinutí připojen odporník, pomocí kterého se natočí fáze proudu tak, aby se současně potlačovalo transformační a reaktanční napětí v komutujících cívkách, tedy aby reaktanční napětí bylo ve fázi s proudem a tokem statoru, transformační napětí se zpozdí o 1/4 periody.
Související články
- motory
- ostatní