Stavový vektor
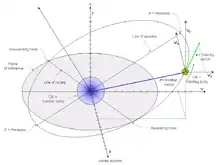
Orbitálny stavový vektor, alebo len stavový vektor obežnej dráhy v astrodynamike a nebeskej dynamike je šesť-rozmerný vektor, ktorý tvoria karteziánsky vektor polohy () a rýchlosti (). Spolu s časom (epocha) () jednoznačne určuje trajektóriu obiehajúceho telesa v priestore.



- Polohový vektor:

- Vektor rýchlosti:

kde , , sú jednotkové vektory karteziánskeho inerciálneho referenčného rámca.



Vektor rýchlosti leží v obežnej rovine a na dotyčnici k trajektórii.

kde je jednotkový vektor tangenty trajektórie v danom momente.

Referenčný rámec
Stavové vektory sú definované s ohľadom na niektorý referenčný rámec, zvyčajne, ale nie vždy, inerciálny referenčný rámec. Jedným z najviac používaných referenčných rámcov pre stavové vektory telies pohybujúcich sa v blízkosti Zeme je systém:
- Zo stredom v centre hmotnosti Zeme;
- Os Z je zhodná s rotačnou osou Zeme, + Z sever;
- Rovina XY sa zhoduje s rovníkovou rovinou Zeme, pričom + X smeruje k jarnej rovnodennosti a os Y je v zmysle pravidla pravej ruky.
Tento referenčný rámec nie je skutočne inerciálny, z dôvodu pomalej 26 000 rokov prebiehajúcej precesie zemskej osi. Používané sú aj referenčné rámce definované orientáciou Zeme v štandardnej astronomickej dobe, ako napríklad B1950 alebo J2000.
Mnohé ďalšie referenčné rámce môžu byť použité, sústredené na Slnko alebo na iné planéty alebo mesiace, definované barycenterom a uhlom slnečnej sústavy alebo dokonca vlastnou orbitálnou rovinou kozmickej lode.
Vektory polohy a rýchlosti
Polohový vektor (x, y, z) opisuje polohu telesa vo zvolenom referenčnom rámci zatiaľ čo vektor rýchlosti (vx, vy, vz) opisuje jeho rýchlosť v tom istom rámci súčasne. Tieto dva vektory a čas, v ktorom sú platné, jednoznačne opisujú trajektóriu telesa.
Príklad
Sonda Parker Solar Probe a jej vektor polohy a rýchlosti v km a km/s v pravouhlom súradnicovom systéme ekliptiky pre referenčnú epochu ICRF/J2000.0 .[1]
- "Target body name: Parker Solar Probe (spacecraft)
- Center body name: Solar System Barycenter (0)
- Coordinate systm: Ecliptic and Mean Equinox of Reference Epoch
- Reference frame : ICRF/J2000.0
- 2458525.500000000 = A.D. 2019-Feb-11 00:00:00.0000 TDB
- X = 1.237967973819378E+08 Y =-4.282473446430393E+07 Z =-7.281281333583204E+06
- VX=-2.725205624226898E+00 VY= 2.001737437645441E+01 VZ= 1.570624927037567E-01"
Pozri aj
- Obežná rovina
- ECEF
Referencie
- JPL's HORIZONS system [online]. JPL, [cit. 2019-02-17]. Dostupné online.