Konvexný obal
V matematike je konvexný obal množiny bodov X na Euklidovskej ploche alebo v Euklidovskom priestore definovaný, ako najmenšia konvexná množina obsahujúca množinu X.
Definícia
Množina bodov je definovaná ako konvexná ak v sebe obsahuje všetky úsečky spájajúce každú dvojicu bodov danej množiny.
Formálne je konvexný obal definovaný ako prienik všetkých konvexných množín obsahujúcich X, alebo ako množina všetkých konvexných kombinácii bodov v X.
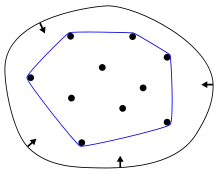
Ako konvexný obal vyzerá si môžeme predstaviť pomocou myšlienkového experimentu. Predstavme si, že X je ohraničená množina bodov na ploche. Ďalej si predstavme každý jej bod ako klinec trčiaci z podlahy. Zoberme elastickú gumičku a natiahnime ju tak aby vnútri nej boli všetky klince. Keď teraz pustíme gumičku, stiahne sa aby minimalizovala svoj obvod a natesno pritom obkolesí všetky klince. Plocha ohraničená touto gumičkou bude konvexný obal množiny bodov X.[1]
Výpočet konvexného obalu
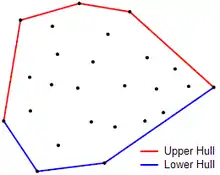
Algoritmický problém hľadania konvexného obalu konečnej množiny bodov v Euklidovských priestoroch je jedným z fundamentálnych problémov geometrie v informatike.
Poznáme množstvo algoritmov na výpočet konvexného obalu konečného počtu bodov alebo rôznych iných geometrických tvarov.
Výpočet konvexného obalu obnáša zostrojenie jednoznačnej a efektívnej reprezentácie požadovaného konvexného útvaru.
Zložitosť jednotlivých algoritmov je zvyčajne odhadovaná v závislosti od , čiže počtu vstupných bodov, a , čiže počtu výstupných bodov, tj. počet bodov tvoriacich konvexný obal.


Pre body v 2D a 3D existujú algoritmy pracujúce s časovou zložitosťou . Pre dimenzie poznáme algoritmy, ktorých časová zložitosť je rovná , co je zároveň aj optimálne riešenie tohoto problému.[2]



Využitie

Problém nájdenia konvexných obalov má praktické využitie napríklad v rozpoznávaní vzorov, spracovaní obrazu, štatistikách, geografickom informačnom systéme, teórii hier, konštrukcii fázových diagramov a statickej analýze kódu pomocou abstraktnej interpretácie. Slúži tiež ako nástroj, stavebný blok, pre množstvo ďalších výpočtovo-geometrických algoritmov.
Konvexný obal je bežne známy ako Minimal Convex Polygon (MCP) v etiológii, kde je klasický, hoci možno zjednodušujúci, prístup pri odhadovaní rozsahu teritória zvieraťa na základe bodov, v ktorých bolo zviera pozorované. Extrémne hodnoty môžu spôsobiť, že MCP je nadbytočne veľký, a preto sa často používajú voľnejšie prístupy, ktoré obsahujú len podmnožinu pozorovaní (napr. nájsť MCP, ktorý obsahuje aspoň 95% bodov).[3]
Referencie
- BERG, Mark de. Computational Geometry: Algorithms and Applications. [s.l.] : Springer Science & Business Media, 2008-03-07. Google-Books-ID: tkyG8W2163YC. Dostupné online. ISBN 9783540779735. S. 3. (po anglicky)
- CHAZELLE, Bernard. An optimal convex hull algorithm in any fixed dimension. Discrete & Computational Geometry, 1993-12-01, roč. 10, čís. 4, s. 377–409. Dostupné online [cit. 2018-02-19]. ISSN 0179-5376. DOI: 10.1007/bf02573985. (po anglicky)
- Examples: The v.adehabitat.mcp GRASS module and adehabitatHR R package with percentage parameters for MCP calculation.