Odstranění šumu
Odstranění šumu, potlačení šumu nebo redukce šumu je proces, který se pokouší odstranit ze signálu šum. Znalost charakteristik šumu a typu signálu může pomoci k výběru konkrétní metody. Bez znalosti charakteristiky šumu nebo signálu není možné šum odstranit. Nejčastěji činěnými předpoklady o šumu jsou: vysoká frekvence, nízká energie, malá korelace s původním signálem.
Obecné metody
Prahování vlnkových koeficientů
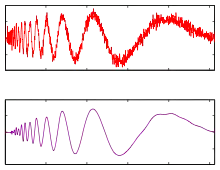
Odstranění šumu a vyhlazení signálu za pomoci prahování vlnkových koeficientů je jednou z nejznámějších a nejjednodušších aplikací vlnkové transformace.
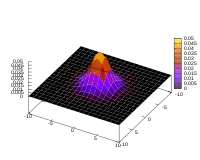
Nejprve se spočítá diskrétní vlnková transformace signálu. Pro prahování koeficientů je možno použít jakýkoli postup. Nejčastěji se ale používá tvrdé (hard) či měkké (soft) prahování.
Při tvrdém se koeficienty menší než práh nahradí nulami.


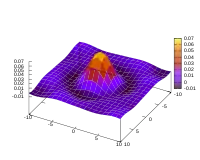
U měkkého se navíc ostatní posunou o velikost prahu směrem k nule (to má za následek větší ztrátu energie signálu).

Volba prahu závisí na použitých vlnkách i charakteru šumu a může být odlišná v různých měřítkách. Pro normální rozdělení šumu se používá

- ,

kde je počet vzorků signálu. Je třeba určit rozptyl šumu. D. L. Donoho a I. M. Johnstone odvodili[1]

- , kde jsou vlnkové koeficienty na nejjemnější úrovni rozkladu.


Pro prahování se signál zpět složí pomocí inverzní DWT.
Obraz

Jedná se například o obraz z digitálních nebo filmových kamer, kde je k dispozici pouze jediná realizace snímku (nelze tedy použít průměrování více snímků).
Typy šumu
V digitálním obraze rozeznáváme nejčastěji dva typy šumu:
- náhodný šum, také nezávislý šum, je způsoben například vadnými CCD elementy (příkladem tohoto typu šumu je šum typu „sůl a pepř“)
- Gaussův šum, také závislý šum, kde je každý pixel obrazu mírně pozměněn
Metody odstranění
U barevných obrazů je třeba vhodně zvolit barevný model, na jehož složky budou metody aplikovány. Metody odstranění šumu můžeme rozdělit následovně:
Lineární filtry
Podle frekvenční charakteristiky šumu mají tyto lineární filtry často charakter dolní propusti. Filtry lze na obraz aplikovat pomocí konvoluce.
- Gaussův filtr
Jedna z metod odstranění šumu je konvoluce s maskou, která se skládá z elementů určených Gaussovou funkcí. Tato metoda vede k rozmazání obrázku, což může být pro další zpracování obrazu problém (například pro detekci hran). Je to efektivní technika k potlačení Gaussova šumu.
2D Gaussova funkce:

- průměrování
Hodnota každého pixelu je určena průměrem jeho a jeho nejbližších sousedů. Opět vede k rozmazání obrazu. Jako Gaussův filtr je efektní k potlačení Gaussova šumu. Je to vlastně speciální případ Gaussova filtru s nekonečnou směrodatnou odchylkou ().

- dolní propust
Obecná dolní propust propustí jen nízké frekvence (šum je zpravidla vysokofrekvenční). Je možné ji aplikovat buď postupně přímo na obraz pomocí konvoluce s malou konvoluční maticí (získanou například inverzní Fourierovou transformací z frekvenční charakteristiky filtru) nebo násobením celé frekvenční charakteristiky filtru s celou frekvenční charakteristikou obrazu (získanou například Fourierovou transformací).
Nelineární filtry
- mediánový filtr
Příkladem nelineárního filtru je mediánový filtr nebo rank-order filtry. Mediánový filtr vezme pro každý pixel obrazu jeho okolí. Ze všech těch pixelů vybere medián, který se stává novou hodnotou zpracovávaného pixelu. Rank-order filtr pracuje podobně, ale nevybírá ze seřazených pixelů okolí medián (ležící přesně uprostřed) ale jinou hodnotu (ležící například ve dvou třetinách). V případě barevného obrazu se pixely porovnávají podle váženého průměru kanálů (například podle intenzity, luma, luminance). Mediánový filtr je vhodný k odstranění náhodného šumu.
- konzervativní vyhlazení
Dalším nelineárním filtrem je tzv. „konzervativní vyhlazení“. Jedná se o rychlou metodu určenou k odfiltrování izolovaných pixelů s výjimečně vysokou nebo nízkou intenzitou (například šum typu sůl a pepř). Tato metoda se snaží nejprve detekovat vadný pixel. Tedy nejdříve nalezne minimální a maximální hodnotu intenzity z okolí pixelu, jehož hodnotu chceme spočítat. Jestliže je hodnota tohoto centrálního pixelu mezi minimem a maximem, je pixel předán do výstupního obrazu beze změny. V opačných případech by měl být pixel nahrazen novou hodnotou, jež je odvozena z nepostižených sousedních pixelů. Například v případě, že je jeho hodnota menší než minimum, je nahrazen tímto minimem. Naopak, je-li jeho hodnota větší než maximum, je nahrazen maximem.
- prahování vlnkových koeficientů
Obraz je rozložen diskrétní vlnkovou transformací a na získané koeficienty je aplikování nejčastěji tvrdé nebo měkké prahování. Metoda je popsána výše.
- další nelineární filtry
Mezi nelineární filtry patří také bilaterální filtr, který při odstranění šumu zachovává ostré hrany, nebo metody založené na Vector-Valued Image Regularization with PDEs[2].
Odkazy
Reference
- Donoho, D. L.; Johnstone, I. M.: Ideal Spatial Adaptation by Wavelet Shrinkage. Biometrika, svazek 81, č. 3, srpen 1994, s. 425–455. K dispozici online.
- D. Tschumperlé, R. Deriche. Vector-Valued Image Regularization with PDE's : A Common Framework for Different Applications, IEEE Transactions on Pattern Analysis and Machine Intelligence (PAMI), April 2005.
Externí odkazy
 Obrázky, zvuky či videa k tématu Odstranění šumu na Wikimedia Commons
Obrázky, zvuky či videa k tématu Odstranění šumu na Wikimedia Commons - (anglicky) http://homepages.inf.ed.ac.uk/rbf/HIPR2/filtops.htm — Digital Filters, materiály Roberta Fishera ze School of Informatics, The University of Edinburgh