Silové napätie v hmote
Silové napätie v hmote alebo napäťový stav látky je vyjadrenie vnútorných silových pomerov v látke, t. j. ako na seba pôsobia dve vzájomne susediace časti látky.
Pretože sila, ktorou na seba pôsobia tieto dve časti, je závislá od veľkosti plochy na ktorej sa tieto časti stýkajú, sila sa vyjadruje pomocou napätia σ, čo je pomer medzi veľkosťou sily F a plochou S na ktorú táto sila pripadá:

Pozn.: Silové napätie vyjadruje iba vnútorné sily v látke, ktorým sa hovorí aj plošné sily. Okrem nich existujú aj objemové, alebo hmotové sily, ktoré pôsobia na každú časticu látky priamo (nie sprostredkovane cez susedné častice ako pri vnútorných silách) a často na veľkú vzdialenosť (gravitácia, elektromagnetizmus).
Pretože pri vnútorných silách ide o vzájomné pôsobenie na ploche, ide o klasický prípad akcie a reakcie, takže vektor plošnej sily môže mať dva navzájom opačné smery, čo závisí od toho, z ktorej strany sa na plochu pozeráme (z hľadiska ktorej časti látky). Daný stav je popísaný iba jediným napätím σ, ale výsledný smer sily je daný jednotkovým normálovým vektorom plochy . Táto idea sa dá jednoducho vyjadriť nasledovne:


Obvyklá dohoda je, že pre silu, ktorá pôsobí na danú časť látky platí vonkajšia strana plochy z pohľadu danej časti. Takže normálový vektor ukazuje na ploche von z objemu vyšetrovanej časti látky.
Tenzor napätia
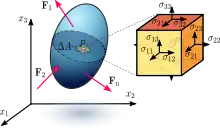
Už uvedený vzorec je iba jednoduchý koncept, pretože realita je zložitejšia. V trojrozmernom priestore existuje existujú tri zložky akéhokoľvek vektora sily. Lenže veľkosť plošnej sily závisí nielen od veľkosti plochy ale aj od jej natočenia v priestore. V trojrozmernom priestore existujú tri základné natočenia plochy (smery normály) a každé iné natočenie je kombináciou základných troch. To dáva spolu 3 zložky plošnej sily na 3 orientácie normály --- spolu 9 zložiek, pričom pri zmene súradnicovej sústavy sa spolu mení všetkých 9 zložiek. Na vyjadrenie takejto veličiny už nestačí pojem vektora, a zavádza sa pojem tenzor. Vektor je vlastne tenzor 1. rádu, tj. veličina, ktorá sa dá zapísať stĺpcom čísel. 9 zložiek silového napätia sa dá zapísať ako dvojrozmerná matica čísel, ktorej hovoríme tenzor 2. rádu. Tenzor 3. rádu by bola trojrozmerná kocka čísel, atď. Takže tenzor silového napätia v látke, v 3-rozmernom priestore, je vlastne špeciálna matica 3x3 čísel, ktorá sa pri zmene súradnicového systému transformuje podobne ako vektory. Je možné ju zapísať troma spôsobmi --- vektorovou symbolikou (dvoma šípkami), tenzorovým zápisom pomocou indexov, a maticou:

Na základe takejto reprezentácie tenzora je možné vyjadriť silu vo všeobecnom prípade:


Prvý index zložky tenzora označuje normálu plochy na ktorej pôsobí, a druhý index označuje smer pôsobenia zložky. Existuje aj opačná interpretácia indexov (napr. u Grahama), ale prv uvedená je konzistentná s najčastejšou definíciou divergencie tenzora odvodenej z nasledovného zápisu (za predpokladu
):


ktorá vystupuje v rovnováhe síl v mechanike tuhých látok a tekutín.
Bohužiaľ, nielenže sa používajú aj opačné interpretácie, ale často sú tieto vzťahy aj nekonzistentné v tom istom prameni. Našťastie, pre všetky súčasné reálne aplikácie je to jedno, pretože na konkrétnom význame indexov nezáleží, pretože sa dá dokázať že , t. j. tenzor je vždy symetrický voči diagonále. Dôležité je len to, aby boli všetky vzťahy konzistentné so zvolenou definíciou divergencie tenzora.

Rozklad tenzora na časti
V mechanike tuhých látok pred zavedením tenzorov a v technických oboroch (napr. strojárstve) sa zvyknú rozlišovať dva druhy napätí:
- normálové napätia , t. j. napätia pôsobiace kolmo na plochu
- tangenciálne napätia , t. j. napätia pôsobiace v rovine


To sa dá zapísať nasledovne:

Naproti tomu v mechanike tekutín (v aerodynamike, hydraulike, ...) je užitočnejšie delenie tenzora napätí na:
- izotropickú časť (nemení sa pri zmene súradnicového systému); a
- neizotropickú (deviatorickú) časť.
Izotropický tenzor 2. rádu (čo je náš prípad napätí) obsahuje iba prvky na diagonále, pričom všetky sú rovnaké. Je to teda násobok jednotkovej matice (Kroneckerovho delta tenzora) a konštanty, ktorou je v prípade tekutín hydrostatický tlak. Hydrostatický tlak býva zďaleka najväčšou zložkou silových napätí v tekutine, preto je také delenie veľmi užitočné. Deviatorickú zložku zatiaľ označme ako sij:

Pretože deviatorický tenzor sij je v tekutinách závislý iba od rýchlosti deformácie a od viskozity, hovorí sa mu aj tenzor viskóznych napätí. Pretože tangenciálne zložky viskózneho napätia sú zhodné s celkovými tangenciálnymi zložkami, namiesto symbolu používa symbol (takmer pravidlo v mechanike tekutín).




Treba si zapamätať odlišný význam symbolu τ v mechanike tekutín oproti významu v inžinierskych oboroch. Jediný rozdiel je v tom, že na diagonále tenzora τ pribudli normálové viskózne napätia.
Upozornenie: V mechanike tekutín sa vyskytujú aj prípady s opačným významom symbolov σ a τ prípadne aj iným označením (π).
Pozri aj
- Napätie
- Mechanické napätie
- Napätie v tekutine
- Mechanika tekutín
- Tenzor
- Zápis vektorov a tenzorov podľa Hassenpfluga (TeX-ovský balík mattens.sty)
Knihy
- Kuzmin, D. (2007). Introduction to CFD.
- Graham, J. (2005). AY 202 - Astrophysical Gas Dynamics.
- Anderson, J. D. J. (1995). Computational Fluid Dynamics. McGraw-Hill. ISBN 0-07-001685-2
- Tannehill, J. C. et al. (1997). Computational Fluid Mechanics and Heat Transfer. Taylor & Francis. ISBN 1-56032-046-X
- Schlichting, H. (1968). Grenzschicht theorie. Verlag G. Braun.
- Wesseling, P. (2000). Principles of Computational Fluid Dynamics. Springer-Verlag. ISBN 3-540-67853-0
- Kundu, P. K. et al. (2002). Fluid Mechanics. Academic Press. ISBN 0-12-178251-4
| Fyzikálny portál |