Ward Leonardovo soustrojí
Ward Leonardovo soustrojí (někdy také Ward Leonardova kaskáda) je nejznámějším a nejvyužívanějším vynálezem Harryho Warda Leonarda. Bylo předvedeno roku 1891 a brzy se stalo nejrozšířenějším způsobem plynulého řízení výkonu, otáček a momentu velkých stejnosměrných pohonů (elektromotorů). Soustrojí mělo na dobu vzniku poměrně dobrou účinnost a především výborné regulační vlastnosti.
Mnohá z těchto zařízení pracují dosud – jedno z nich slouží (nyní již jen jako záložní zdroj) k pohonu lanové dráhy na Petříně[1] a též sloužilo k pohonu lanové dráhy Tatranská Lomnica – Skalnaté pleso – Lomnický štít. V současné době se pro regulaci otáček a výkonu používá spíše asynchronní motor s frekvenčním měničem.
Popis funkce
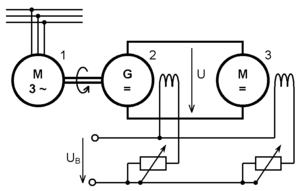
Ward Leonardovo soustrojí se skládá z následujících prvků:
- poháněcí stroj (synchronní motor, asynchronní motor, spalovací motor, stabilní parní stroj atd.)
- dynamo obvykle s cizím buzením
- stejnosměrný motor s cizím buzením
Poháněcí stroj (1) je na společné hřídelí s dynamem (2). Toto soustrojí může mít na společné hřídeli připojen setrvačník, označovaný jako Illgnerův měnič. Soustrojí může pracovat s konstantními otáčkami, čemuž napomáhá i setrvačník, sloužící jako akumulátor energie. K poháněcímu stroji bývá připojen ještě zdroj budicího proudu – budič (dnes nahrazován polovodičovým usměrňovačem napájeným z rozvodné sítě). Kotva (rotor) dynama (2) je meziobvodem elektricky spojena přímo s kotvou ss motoru (3). Stejnosměrný motor (3) pohání příslušné pracovní zařízení.
- Regulace budícího proudu
Regulace buzení, tj. regulace budicích proudů bývá obvykle provedena jako odporová.
- Uvedení do provozu
Před a během rozběhu poháněcího stroje (1) je buzení statoru dynama (2) odbuzeno. Soustrojí se rozbíhá naprázdno do jmenovitých otáček. Kotvou dynama a kotvou motoru neprotéká proud.
Rozběh a regulace motoru (3).
- Po ukončení rozběhu poháněcího stroje (1) je plně nabuzen stator motoru (3). Kotvami dynama (2) i motoru (3) ještě neprochází proud a motor (3) se nehýbe.
- Připojením budicího proudu do budicího vinutí statoru dynama (2) se indukuje na kotvě dynama elektrické napětí (U) a meziobvodem vzájemně elektricky spojenými kotvami dynama (2) a motoru (3) začne procházet proud a motor se začne otáčet.
- Zvyšováním budicího proudu dynama se zvyšuje napětí meziobvodu a zvyšují se otáčky a výkon motoru (3) až do okamžiku plného nabuzení dynama. Při zvyšování otáček motoru v této oblasti pracuje motor při konstantním kroutícím momentu a lineárně rostoucím výkonu na hřídeli. Motor se rozběhne až do jmenovitých otáček, které jsou dány plným budicím proudem dynama a napětím meziobvodu.
- Otáčky motoru (3) je možné zvýšit pomocí odbuzování motoru (3) při plném buzení dynama (2). Při zvyšování otáček motoru v této oblasti pracuje motor při konstantním výkonu a klesajícím kroutícím momentu na hřídeli. Při odbuzování motoru hrozí nebezpečí, že po odlehčení hřídele motoru nastane nekontrolované zvýšení otáček s možnými následky. Druhým nebezpečím je pokles kroutícího momentu motoru pod požadovanou úroveň kroutícího momentu poháněného zařízení a pohon se zastaví.
Reverzace motoru (3). Motor (3) je možno reverzovat změnou smyslu budicího proudu v motoru, nebo změnou smyslu budicího proudu v dynamu, nebo změnou smyslu proudu v kotvě motoru. Pro pomalý průběh reverzace je možno použít změnu buzení dynama nebo motoru. Pro rychlou změnu směru otáček je nutno obrátit proud v kotvě motoru.
Illgnerův měnič. Při pohonu zařízení, které vyvolává velké nárazy momentu a výkonu, je na hřídel dynama (2) nainstalován setrvačník, označovaný jako Illgnerův měnič (též Illgnerův tlumič), sloužící jako akumulátor energie. Tím je částečně vyhlazen průběh příkonu poháněcího stroje (1). Umožňuje použít poháněcí stroj (1) menšího výkonu a současně odlehčuje přívodnímu napájecímu vedení a napájecímu zdroji. Mohl být použit například pro pohon válcovacích stolic, kde je požadována častá rychlá reverzace motoru (zastavení a rozběh).
Fyzikální základ
Platí vztah , kde P je výkon [W], M moment síly [N.m] a ω je úhlová rychlost [1/s].

Stroje uprostřed řetězce tedy byly v roli výkonových dvojbranů, jak toto studuje obor teorie systémů.
Obdoba pro asynchronní motory
Podobné soustrojí lze sestavit pro ovládání otáček asynchronních motorů, které jinak mají své limitní synchronní otáčky dané jednak svou konstrukcí (počtem pólů) a dále kmitočtem sítě. Tedy ustálené otáčky AM (naprázdno i pod zátěží) skutečně šlo ovládat i před nástupem polovodičů, motory však k tomu musely být uzpůsobené: Bylo potřeba mít tzv. "kroužkový motor", tedy AM s opravdu vinutým rotorem, kdy se tento používal zároveň jako motor a i jako transformátor. Z rotoru se mu odebíralo tansformované napětí o snížené frekvenci. Snížení frekvence odpovídalo rozdílu "otáček sítě" proti otáčkám "rotujícího transformátoru". Takto z kroužků se pak napájel jiný AM, už i obyčejný s kotvou nakrátko, který konečně byl samotným užitečným pohonem.
Synchronní otáčky ovládaného pohonu se tedy mohly pohybovat v rozsahu:
- od úplné nuly (kroužkový AM na svých synchronních otáčkách),
- po běžné synchronní otáčky sítě (kroužkový AM zastavený, ve funkci čistého transformátoru)
- a dokonce i s navýšenou frekvencí, kdy kroužkový AM byl nějakým svým pohonem přetáčen proti síti (v režimu protiproudu).
- Teoreticky tak šlo pohon i reverzovat, přetočením kroužkového motoru přes synchronní otáčky do generátorového režimu, kdy se indukovaná frekvence pro pohon (sled fází) dokonce otočila, ale to je snazší a účinnější dělat pomocí prostého přepnutí.
V každém případě šlo o spíše menší pohony, protože kroužkový stroj by se při zastavení značně zahříval: Přeci jen přenáší veškerý výkon pohonu přes svou vzduchovou mezeru a své železo. Musel na takové použití být dimenzován: Tepelně jako servo; Celkově AM pohonu neměl napětí sítě, nýbrž nižší, a s jen omezeným možným přikonem.
Reference
- Lanová dráha na stránkách prazsketramvaje.cz
Externí odkazy
- - Technické prostředky automatizace, hgf.vsb.cz přes archive.org; PDF online.