Markovův rozhodovací proces
Markovovy rozhodovací procesy jsou pojmenovány po ruském matematikovi Andreji Markovovi. Poskytují matematický rámec pro modelování rozhodování v situacích, kdy jsou výsledky zčásti náhodné a zčásti pod kontrolou uživatele. Markovovy rozhodovací procesy se využívají pro studium mnoha typů optimalizačních problémů, řešených prostřednictvím dynamického programování a zpětnovazebního učení. Markovovy rozhodovací procesy jsou známy od 50. let 20. století (viz Bellman 1957). Mnoho výzkumu v této oblasti bylo učiněno na základě knihy Ronalda A. Howarda Dynamické programování a Markovovy procesy z roku 1960. Dnes jsou využívány v různých oblastech včetně robotiky, automatizovaného řízení, ekonomie a průmyslové výroby.
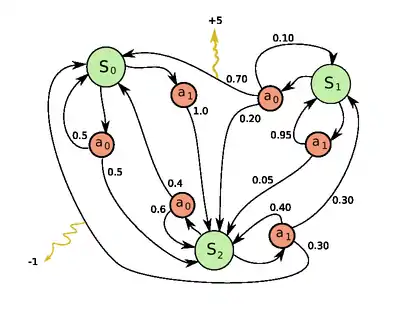
Přesněji řečeno je Markovův rozhodovací proces diskrétní, stochastický a kontrolovaný proces. V každém časovém okamžiku je proces v určitém stavu a uživatel může vybrat jakoukoli akci , která je dostupná ve stavu . Proces na tuto akci v následujícím časovém okamžiku reaguje náhodným přesunutím do nového stavu a dává uživateli odpovídající užitek .




Pravděpodobnost, že proces vybere jako nový stav, je ovlivněna vybranou akcí. Pravděpodobnost je určena funkcí přechodu stavu . Takže následující stav závisí na současném stavu a na uživatelově akci . Dané a jsou však podmíněně závislé na všech předchozích stavech a akcích. Jinými slovy má přechod stavu Markovova rozhodovacího procesu Markovovu vlastnost.

Markovovy rozhodovací procesy jsou rozšířením Markovových řetězců; rozdíl je v přidání akcí (umožňují výběr) a užitků (motivace). Pokud by existovala pouze jedna akce, nebo pokud by byla daná uskutečnitelná akce stejná pro všechny stavy, Markovův rozhodovací proces by se zredukoval na Markovův řetězec.
Definice
Markovův rozhodovací proces je uspořádaná čtveřice , kde

- je konečná množina stavů,
- je konečná množina akcí (alternativa: je konečná množina akcí dostupných ve stavu ),
- je pravděpodobnost, že akce ve stavu v čase povede v čase do stavu ,
- je okamžitý užitek (ne očekávaný okamžitý užitek) dosažený po přechodu stavu na ze stavu s pravděpodobností přechodu .






(Teorie Markovových rozhodovacích procesů ve skutečnosti nevyžaduje, aby nebo byly konečné množiny, ale základní algoritmus níže předpokládá, že jsou konečné).
Problém
Hlavním úkolem Markovových rozhodovacích procesů je najít strategii pro uživatele: funkci , která specifikuje akci , kterou zvolí uživatel ve stavu . Je třeba poznamenat, že je-li jednou Markovův rozhodovací proces takto zkombinován se strategií, je pro každý stav určena akce a výsledná kombinace se chová jako Markovův řetězec.


Cílem je vybrat strategii , která bude maximalizovat kumulativní funkci náhodných užitků, typicky očekávanou diskontovanou sumu za potenciálně nekonečnou dobu:
- (kde zvolíme )


kde je diskontní faktor splňující . Typicky se blíží 1.


Díky Markovově vlastnosti může být optimální strategie pro tento speciální problém skutečně zapsána jako funkce pouze , jak bylo předpokládáno výše.
Řešení
Markovovy rozhodovací procesy lze řešit metodami lineárního programování nebo dynamického programování. Následující text ukazuje použití dynamického programování.
Předpokládejme, že známe funkci přechodu stavu a užitkovou funkci . Chceme zjistit strategii, která maximalizuje očekávanou diskontovanou hodnotu.


Standardní skupina algoritmů používaná pro zjištění této optimální strategie vyžaduje uložení dvou polí indexovaných stavem: hodnota , která obsahuje reálné hodnoty, a strategie , která uchovává akce. Na konci algoritmu bude obsahovat řešení a bude obsahovat diskontovanou sumu užitků, které budou (v průměru) získány provedením tohoto řešení ve stavu .


Algoritmus má následující dva druhy kroků, které jsou opakovány v určitém pořadí pro všechny stavy, dokud nedojde k nějakým[kdo?] změnám.


R(s) je zde . Pořadí kroků závisí na variantě algoritmu. Kroky se buď mohou provádět pro všechny stavy najednou, nebo pro každý stav popořadě, a pro některé stavy častěji než pro jiné. Dokud není žádný stav permanentně vyloučen ze žádného z kroků, algoritmus má šanci dospět ke správnému řešení.

Iterace hodnot
Při iteraci hodnot (Bellman 1957), která se rovněž nazývá zpětná indukce, není pole použito; místo toho je hodnota vypočtena kdykoli je potřeba.
Dosazením výpočtu do výpočtu dostaneme kombinovaný krok:

Toto zaktualizované pravidlo je opakováno pro všechny stavy dokud nekonverguje s levou stranou rovnou pravé straně (což je Bellmanova rovnice pro tento problém).
Iterace strategie
Při iteraci strategie je první krok proveden jednou a druhý krok je opakován dokud nekonverguje. Poté je znovu jednou proveden první krok a tak stále dokola.
Místo toho, aby byl druhý krok opakován dokud nekonverguje, měl by být problém formulován a řešen jako množina lineárních rovnic.
Tato varianta má výhodou, že zde existuje konečná podmínka ukončení: algoritmus je dokončen, pokud se pole nezmění ve směru působení prvního kroku na všechny stavy.
Upravená iterace strategie
V upravené iteraci strategie (van Nunen, 1976; Puterman a Shin 1978) je první krok vykonán jednou a druhý krok je několikrát opakován. Poté je opět proveden první krok atd.
Prioritizace kroků
V této variantě jsou kroky přednostně aplikovány na stavy, které jsou nějakým způsobem důležité – buď jsou založené na algoritmu (v těchto stavech došlo k velkým změnám nebo během posledních iterací) nebo jsou založeny na použití (tyto stavy jsou blízko počátečnímu stavu, nebo jsou jinak zajímavé osobě nebo programu, který používá algoritmus).
Rozšíření
Částečná pozorovatelnost
Výše uvedené řešení předpokládá, že pokud je třeba učinit akci, je stav známý; jinak nemůže být vypočteno. Pokud tento předpoklad není pravdivý, nazývá se problém částečně pozorovatelný Markovský rozhodovací proces.
Zpětnovazební učení
Pokud jsou pravděpodobnosti či užitky neznámé, jedná se o problém zpětnovazebního učení (Sutton a Barto, 1998).
Pro tento účel je užitečné definovat další funkci, která odpovídá učinění akce a následnému optimálnímu pokračování (nebo podle toho, o jakou strategii se aktuálně jedná):

Zatímco tato funkce je taktéž neznámá, zkušenost během učení je založena na dvojicích (spolu s výsledkem ). To znamená: „Byl jsem ve stavu a zkoušel jsem učinit a stalo se “). Čili máme pole a využíváme zkušenosti k jeho přímé aktualizaci. Uvedené nazýváme Q-učení.


Síla zpětnovazebního učení leží v jeho schopnosti řešit Markovův rozhodovací proces bez výpočtu pravděpodobností přechodu. Uvědomme si, že pravděpodobnosti jsou potřebné pro iteraci hodnoty i strategie. Zpětnovazební učení může být taktéž kombinováno s aproximací funkcí a tím lze řešit problémy s velkým množstvím stavů. Zpětnovazební učení může být rovněž snadno vykonáváno v rámci simulací systémů pomocí metody Monte Carlo.
Alternativní zápisy
Terminologie a notace pro Markovovy rozhodovací procesy není jednoznačná. Existují dva hlavní proudy; první, zaměřený na maximalizační problémy z oblastí jako je ekonomie, používá termíny jako je akce, užitek, hodnota a označuje diskontní faktor nebo ; druhý je zaměřený na minimalizační problémy z oblastí techniky a navigace a používá termíny jako je kontrola, cena, cena změny, a diskontní faktor označuje . Liší se i zápisy pro pravděpodobnost přechodu.



| v tomto článku | alternativa | komentář |
|---|---|---|
| akce | řízení | |
| užitek | cena | je negativní |
| hodnota | cena změny | je negativní |
| strategie | strategie | |
| diskontní faktor | diskontní faktor | |
| pravděpodobnost přechodu | pravděpodobnost přechodu |





Někdy se pravděpodobnost přechodu zapisuje jako, nebo méně často



Reference
V tomto článku byl použit překlad textu z článku Markov decision process na anglické Wikipedii.
- R. Bellman. A Markovian Decision Process. Journal of Mathematics and Mechanics 6, 1957.
- R. E. Bellman. Dynamic Programming. Princeton University Press, Princeton, NJ, 1957. Dover paperback edition (2003), ISBN 0-486-42809-5.
- Ronald A. Howard Dynamic Programming and Markov Processes, The M.I.T. Press, 1960.
- D. Bertsekas. Dynamic Programming and Optimal Control. Volume 2, Athena, MA, 1995.
- M. L. Puterman. Markov Decision Processes. Wiley, 1994.
- H.C. Tijms. A First Course in Stochastic Models. Wiley, 2003.
- Sutton, R. S. and Barto A. G. Reinforcement Learning: An Introduction. The MIT Press, Cambridge, MA, 1998.
- J.A. E. E van Nunen. A set of successive approximation methods for discounted Markovian decision problems. Z. Operations Research, 20:203-208, 1976.
- S. P. Meyn, 2007. Control Techniques for Complex Networks, Cambridge University Press, 2007. ISBN 978-0-521-88441-9. Appendix contains abridged Meyn & Tweedie.
- S. M. Ross. 1983. Introduction to stochastic dynamic programming. Academic press
Související články
Externí odkazy
- MDP Toolbox for Matlab An excellent tutorial and Matlab toolbox for working with MDPs.
- Reinforcement Learning: An Introduction by Richard S. Sutton and Andrew G. Barto
- SPUDD A structured MDP solver for download by Jesse Hoey
- Learning to Solve Markovian Decision Processes by Satinder P. Singh