Regulátor (automatizace)
Regulátor je zařízení pro ovlivňování regulovaného systému, automatizovanou regulaci, k dosažení a udržení jeho požadovaného stavu. Typicky se používá v záporné zpětné vazbě systému. Vstupem regulátoru pak nebývá přímo sledovaná veličina jako výstup celého systému, ale jen odchylka od požadované hodnoty. Regulátor pak reguluje systém s cílem buď úplné eliminace odchylky, nebo jeho regulační zásahy odchylku alespoň udržují v předepsaných mezích. Regulátor čte stavy systému, a to buď přímo, anebo, jsou-li nedosažitelné, si je rekonstruuje vlastním modelem. Modelováním systémů a jejich regulátorů se zabývá teorie řízení. Regulátor bývá na systém připojen přes vstupní a výstupní převodníky. Regulace je při čtení systému v čase buď spojitá, nebo diskrétně vzorkovaná. I zásahy do systému mohou být buď analogové, nebo digitální, stupňovité.
Dynamika regulátoru může být:
- prostá proporcionální: pouze zesílením,
- derivační: zesilující při krátkodobé změně,
- integrační: s pamětí a postupným načítáním i malých odchylek.
- zpožďovací člen: zpožděná reakce o časovou konstantu τD (dopravní zpoždění)
- zpožďující 1. řádu: zpoždění vyrovnání změny o časovou konstantu τ (řecké tau)
- zpožďující 2. řádu: "kmitavá"; dvě časové konstanty
- kmitavá: několikrát překmitne a podkmitne novou požadovanou hodnotu než se zcela vyrovná
Příklady způsobů zásahů regulace
- spojité zásahy (operační zesilovač),
- zásahy v diskrétních hodnotách (přepínač hvězda trojúhelník),
- analogové hodnoty zásahů v diskrétním čase (analogová paměť),
- simulace analogových hodnot zásahů rychlým přepínáním mezních hodnot (pulzně šířková modulace, šířka pulzu v konstantní periodě),
- využití hystereze povoleného rozpětí (vlastní taktování ledničky)
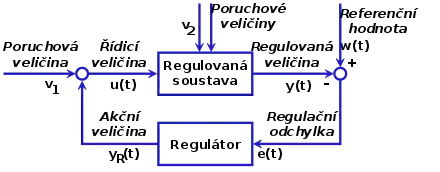
Výsledkem činnosti regulátoru po zpracování tzv. regulační odchylky je určení reakce, tedy tzv. akčního zásahu, o který se upraví regulovaná vstupní veličina, typicky odečtením, při záporné zpětné vazbě. Jedna veličina, výsledný signál o akčním zásahu, tedy nese informaci, ne však výkon: Výkonové projevy regulačního signálu zajistí tzv. akční člen, pomocí již dvou výkonových veličin, zobecněného úsilí a zobecněného toku.
Kvalita regulace
Stabilita regulace - Průběh ustálení regulované veličiny po jejím vychýlení z rovnovážné úrovně zpět na rovnovážnou polohu nebo na novou rovnovážnou polohu.
Kvalita regulace - Souzena podle průběhu (tvar, trvání) přechodového děje a podle odezvy na působení rušivé veličiny.
Přesnost regulace - Úplné přesnosti nelze nikdy docílit, protože ustálený stav nastává v čase t=nekonečno. Princip regulace tedy musí pracovat s určitou chybou - "regulační odchylkou". Přesnost regulace je určována regulační odchylkou s jakou systém udržuje regulovanou veličinu v předepsaných mezích.
Doba regulace - značená jako Tr; doba, po které dosáhne rozkmitaná veličina předepsaných mezí přesnosti a už nevykmitne. Než dosáhne regulace času Tr, počítají se tzv. přeregulování (počet překmitů veličiny nad a pod požadovanou ustálenou hodnotu)
Příklady regulovaných veličin a jejich dynamik
- teplota (podle rozměrů, akumulační a izolační schopnosti, sekundy až hodiny): lednička, kotel, pec.
- poloha a pohyb (různě hluboké derivace z Taylorova rozvoje polohy): robotika, turbína.
- napětí a proud: obvody s operačními zesilovači, stabilizace proudu, regulovaný zdroj napětí.
- zesílení frekvenčního pásma: zesilovač, frekvenční měnič.