PID regulátor
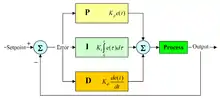
PID regulátor patří mezi spojité regulátory, složený z proporcionální, integrační a derivační části. V systémech řízení se řadí před řízenou soustavu. Do regulátoru vstupuje regulační odchylka a vystupuje akční veličina (někdy značeno ). Přenos regulátoru se vyjadřuje jako poměr těchto veličin



- V technických oborech se používá Laplaceova transformace


Proporcionální složka regulátoru
Proporcionální složka, P regulátor, je prostý zesilovač. Akční veličina je přímo úměrná regulační odchylce.
- kde je činitel zesílení, někdy je také uváděn jako konstanta zesílení . Po použití transformace
- U jednoduchých soustav, kde výstup je zhruba proporcionální akční veličině plus působení „poruchové veličiny“ se působení poruchy projevuje trvalou regulační odchylkou. Velikost regulační odchylky je pak úměrná velikosti poruchové veličiny a nepřímo úměrná zesílení regulátoru. Zvyšování zesílení nad určitou mez však vede k nestabilitě regulované soustavy.




Malá trvalá regulační odchylka může být v mnoha případech přijatelná, použití regulátoru každopádně zlepší chování systému.
Pásmo proporcionality
Pásmo proporcionality udává, o kolik procent se musí změnit vstupní signál (regulační odchylka), aby se výstup (akční veličina) změnil v celém rozsahu

Integrační složka regulátoru
Integrační složka regulátoru, I regulátor, je takový regulátor, kdy akční veličina je přímo úměrná integrálu regulační odchylky. je zesílení integračního regulátoru.

- Tomu odpovídá přenos
- V technické praxi se častěji setkáme s časovou konstantou než se zesílením integračního regulátoru .



Následující úvaha platí pro jednoduché soustavy, kde výstup je zhruba proporcionální akční veličině plus působení „poruchové veličiny“. V takovém případě dokáže I-regulátor úplně eliminovat regulační odchylku. Regulační děj je však pomalejší a proti P-regulátoru může být horší stabilita soustavy. V technické praxi může docházet vlivem integrace k překmitům. Tento jev se nazývá wind-up a může se řešit přidáním nespojitého prvku (např. relé) mezi regulátor a soustavu, který v případě nulové odchylky akční veličinu omezí.
Derivační složka regulátoru
Derivační složka regulátoru, D regulátor, je takový regulátor, kdy akční veličina je přímo úměrná derivaci regulační odchylky. Vzhledem k tomu, že „čistá“ derivace není technicky realizovatelná, mluvíme o ideálním D regulátoru.
- Tomu odpovídá přenos
- Derivační regulátor se používá pro zrychlení regulačního děje. Jeho nevýhodou je, že zesiluje šum, což může v některých případech vést až k jeho praktické nepoužitelnosti. Samostatně se D-regulátor nikdy nepoužívá, pouze jako D-složka je součástí PD regulátoru a PID regulátoru.


Realizovatelný D-člen
D regulátor (či spíše D-člen regulátoru) můžeme technicky realizovat (nebo jeho realizaci modelovat) přidáním slabé integrační složky s „realizační konstantou“ ε. Výstupem „čistého“ D-členu by totiž v případě skokové změny na vstupu byl Diracův skok, což není fyzikálně možné. Při digitální implementaci by to jednak vedlo k aritmetickému přetečení, jednak je reakce regulátoru omezena vzorkováním.
Konstanta ε se může pro modelování reálného D-členu uvažovat např. stokrát menší než hodnota v čitateli, ale pokud je příliš malá (např. pětsetkrát), nemusí být výpočetní model regulátoru stabilní.

PID regulátor
PID regulátor si můžeme představit jako součet P-regulátoru, I-regulátoru a D-regulátoru:
- Tomu odpovídá přenos
- Pro praktickou realizaci se používá tvar s , a . Poslední tvar se používá v simulacích a teoretických výpočtech. Pro modelování technicky realizovatelného regulátoru je možné doplnit „realizační konstantu“ pro D-složku regulátoru.




Při regulaci PID regulátorem na počátku regulace převládá vliv derivační složky, postupem času má větší vliv integrační složka.[1]
Redukované varianty PID regulátoru
Jedná se o P-regulátor, PD-regulátor a PI-regulátor. Na tyto regulátory můžeme pohlížet jako na PID regulátor, u kterého je vyřazena některá složka. To může být nezbytné např. kvůli stabilitě soustavy, kvůli zjednodušení implementace (nebo nastavování parametrů) regulátoru atp.
Diskrétní forma PID regulátoru
Pro realizaci PID regulátoru jako algoritmu pro PLC se používá diskrétní forma PID regulátoru. Ta má dva tvary:


Výhodou přírůstkové formy diskrétního PID regulátoru je odolnost vůči wind-up efektu a dále implementovatelnost adaptivních parametrů s beznárazovou změnou jejich hodnot.[2]
Modifikace PID regulátoru
PIDD²
PIDD² je varianta PID regulátoru, která při výpočtu velikosti akčního zásahu navíc využívá ještě druhou derivaci regulační odchylky, akční zásah je určování podle vztahu
- ,

kterému odpovídá přenos
- .[3]

Neceločíselný PID
Neceločíselný PID regulátor je regulátor s přenosem
- ,

kde λ a μ nejsou celá čísla.[4]
PID řízený událostmi
PID řízený událostmi dostává informace o velikosti regulované veličiny nebo regulační odchylky nepravidelně, při splnění nastavené podmínky, např. pouze když se regulovaná veličina změní podstatně.[4] Existuje několik realizací PID regulátoru řízeného událostmi, jednou z úspěšně aplikovaných v průmyslu je algoritmus PIDplus.[4]
Reference
- Elektrotechnika [online]. Kapitola Složené spojité regulátory. Schválilo MŠMT č. j. MSMT-7521/2015-40 dne 28. 8. 2015 k zařazení do seznamu učebnic pro střední školy. Dostupné online.
- Perform Common Process Loop Control Algorithms [online]. February 2016. Dostupné online.
- SAHIB, Mouayad A. A novel optimal PID plus second order derivative controller for AVR system. Engineering Science and Technology, an International Journal. June 2015, roč. 18, čís. 2, s. 194–206. Dostupné online. ISSN 2215-0986.
- VISIOLI, Antonio. Research Trends for PID Controllers. Acta Polytechnica. Roč. 52, čís. 5/2012, s. 144–150. Dostupné online.
Literatura
- ŠVARC, Ivan; ŠEDA, Miloš; VÍTEČKOVÁ, Miluše. Automatické řízení. Brno: Akademické nakladatelství CERM Brno, 2007. 324 s. ISBN 978-80-214-3491-2.
- BLAHA, Petr; VAVŘÍN, Petr. Řízení a regulace I [online]. Brno: Ústav automatizace a měřicí techniky (ÚAMT), Fakulta elektrotechniky a komunikačních technologií Vysokého učení technického v Brně [cit. 2022-04-18]. Dostupné online.
Externí odkazy
 Obrázky, zvuky či videa k tématu PID regulátor na Wikimedia Commons
Obrázky, zvuky či videa k tématu PID regulátor na Wikimedia Commons - (česky)Průmyslové PID regulátory: Tutorial, Miloš Schlegel, REX Controls, rexcontrols.cz
- (česky)PID Controller Laboratory, pidlab.com
- Single Active Element PID Controllers (PID s operačním zesilovačem)