Metoda konečných prvků
Metoda konečných prvků (MKP, anglicky Finite element method, FEM) je numerická metoda sloužící k simulaci průběhů napětí, deformací, vlastních frekvencí, proudění tepla, jevů elektromagnetismu, proudění tekutin atd. na vytvořeném fyzikálním modelu. Její princip spočívá v diskretizaci spojitého kontinua (viz Galerkinova metoda) do určitého (konečného) počtu prvků. MKP je užívána především pro kontrolu již navržených zařízení, nebo pro stanovení kritického (nejnamáhanějšího) místa konstrukce. Ačkoliv jsou principy této metody známy již delší dobu, k jejímu masovému využití došlo teprve s nástupem moderní výpočetní techniky.
Historie
Metoda konečných prvků vznikla díky potřebě řešit složité úlohy z pružnosti a strukturní analýzy v inženýrské praxi. Její počátky lze vysledovat v práci Alexandera Hrennikoffa (1941) a Richarda Couranta (1942)[zdroj?]. Ačkoliv byly přístupy použité těmito průkopníky v zásadě odlišné, měly jednu společnou charakteristiku: rozdělení spojité oblasti do množiny samostatných podoblastí.
Hrennikoffova práce rozděluje oblast pomocí mřížky, zatímco Courantův přístup dělí oblast do konečného množství trojúhelníkových elementů. Následuje řešení eliptických parciálních diferenciálních rovnic druhého stupně, které byly sestaveny z úlohy zabývající se krutem válce.
Vývoj MKP začal v 50. letech 20. století na univerzitě ve Stuttgartu prací Johna Argyrise a pokračoval na univerzitě v Berkeley prací Raye W. Clougha v 60. letech. Na konci 60. let nechala NASA vyvinout software NASTRAN pracující na principu MKP.
V roce 1965 Feng Kang navrhl numerickou metodu nazvanou "metoda konečných diferencí založená na principu variace", což je ekvivalent MKP. Jeho práce zůstala západnímu světu dlouhá desetiletí skryta.
Princip
Metoda konečných prvků je založena na Lagrangeově principu: Těleso je v rovnováze, jestliže celková potenciální energie deformace soustavy je minimální.
Postup
Preprocesor (připravení modelu, diskretizace) → Solver (výpočet) → Postprocesor (zobrazení), konkrétněji:
- CAD Model
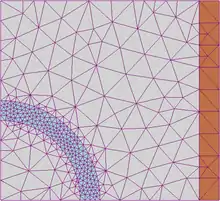
- Diskretizace modelu (nahrazení spojitého objemu modelu konečným počtem prvků, resp. uzlových bodů)
- Pro každý diskrétní bod získáme 3 rovnice – pole posuvů do všech směrů (x,y,z) a snažíme se spočítat pole deformací (6 rovnic) a pole napětí (6 rovnic)
- Nahrazení funkce posuvů polynomem a vyjádření funkce posuvů
- Zavedení okrajových podmínek
- Výpočet soustavy lineárních algebraických rovnic
- Výpočet deformací a napětí pro jednotlivé uzlové body
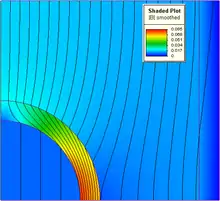
- Většinou grafické zobrazení na modelu s výpisem důležitých hodnot
Aplikace
MKP nachází uplatnění v mnoha oborech při vývoji produktů, zpravidla v oblasti strojního inženýrství (např. letecký a automobilní průmysl, biomechanika). Některé moderní programy MKP obsahují specifické nástroje (tepelné, elektromagnetické, fluidní a strukturální simulace).
MKP umožňuje detailní zobrazení struktur při ohýbání nebo kroucení, kompletní návrh, testování a optimalizaci ještě před vyrobením prototypu.
Tento mocný nástroj pro navrhování výrazně zlepšil i úroveň technických výkresů a způsob konstruování v mnohých průmyslových aplikacích. Zavedení MKP se výrazně snížila doba, od původního návrhu k hotovému výrobku. Stručně řečeno, k výhodám MKP patří především virtuální prototypování, méně fyzických prototypů, rychlejší a méně nákladný konstrukční cyklus, zvýšení produktivity a snížení nákladů.
Výhody výpočtových metod CAD systémů
- Zkrácení vývojového času
- Snížení výrobních nákladů na zavedení do výroby
- Zvyšování kvality
- Inovace, dodržování norem, …
Systémy
Jednotlivé (specializované) systémy:
Související články
Externí odkazy
 Obrázky, zvuky či videa k tématu metoda konečných prvků na Wikimedia Commons
Obrázky, zvuky či videa k tématu metoda konečných prvků na Wikimedia Commons - MKP[nedostupný zdroj] na webu Lesnické a dřevařské fakulty Mendelovy univerzity v Brně
- MKP na webu Fakulty strojní Západočeské univerzity v Plzni
- Vysoká škola Báňská – Technická Universita Ostrava – Fakulta Stavební – Katedra Stavební Mechaniky