Regulátor (technika)
Regulátor je zariadenie, ktoré sa stará, aby daný systém automaticky pracoval a fungoval v požadovanom rozsahu hodnôt. Riadeným systémom môže byť napríklad motor, elektromotor, vykurovanie, klimatizácia, chemický proces atď.
Napríklad pri elektromotore potrebujeme udržiavať konštantné otáčky. Problém nastáva, keď elektromotor odrazu zaťažíme, jeho otáčky mierne klesnú. Preto sa používa regulátor, ktorý kompenzuje následky zmeny záťaže prejavujúce sa na otáčkach.
Funkcia
Sledovaný parameter sa odčíta senzorom a regulátor vypočíta riadiaci zásah tak, aby tento parameter upravil na nami žiadanú hodnotu.
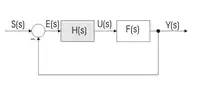
Na obrázku vidieť, že želaná hodnota S(s) vchádza do systému, kde sa od nej odpočíta výstup systému Y(s) (spätná väzba). Z toho vznikne regulačná odchýlka E(s). Tá vchádza do regulátora H(s), ktorý vypočíta riadiaci zásah, ktorý ide do riadeného systému F(s) z ktorého vychádza jeho výstup Y(s).
- H(s) - prenosová funkcia regulátora
- F(s) - prenosová funkcia riadeného systému
Regulátor je navrhovaný tak, aby po určitom čase bola regulačná odchýlka nulová (alebo veľmi malá).
Napríklad pri elektromotore:
- Y(s) - Pri elektromotore sú to napríklad otáčky, ktoré sa dajú zvyšovať/znižovať zvyšovaním/znižovaním napätia na kotve.
- U(s) - Riadiaci zásah je v tomto prípade veľkosť tohto napätia.
Ak sú aktuálne otáčky vyššie ako požadované, tak je regulačná odchýlka < 0 a regulátor znižuje napätie, naopak ak sú nižšie, regulačná odchýlka je > 0 a regulátor napätie zvyšuje.
Pri lineárnych systémoch ako tepelné procesy alebo elektromotory je riešenie takéhoto problému jednoduché. Náročnejšie je keď riadenie kmitavých systémov alebo systémov s dopravným oneskorením, vtedy sa ručne nastavujú ťažko. Návrhom regulátorov sa zaoberá teória (automatického) riadenia, ktorá má rozvinuté metódy na riešenie rôznych druhov systémov.
Typy regulátorov
Podľa algoritmu:
- Lineárne regulátory
- Nelineárne regulátory
- Fuzzy regulátory
- Neurónová sieť
- Neuro-Fuzzy regulátory
Podľa techniky:
- Analógové (spojité) regulátory
- Digitálne (diskrétne) regulátory
Pojmy
- Regulačná odchýlka – predstavuje rozdiel želanej hodnoty regulovaného parametra a jeho nameranej hodnoty.
- Spätná väzba – spätná väzba nastáva, keď je vstup do systému ovplyvňovaný jeho výstupom. Spätná väzba môže byť kladná alebo záporná. O zápornej spätnej väzbe hovoríme, keď sa Y(s) odpočítava od S(s).
- Riadiaci zásah – je hodnota alebo vektor hodnôt, ktorú regulátor vypočítava a posiela do systému (napríklad riadiace napätie, otvorenie ventilu, atď.).
- Želaná hodnota – hodnota, ktorú má riadený parameter dosiahnuť (napr. teplota v miestnosti, prietok kvapaliny, otáčky motora, atď.).
- Riadenie na želanú hodnotu – je vhodné ak často meníme želanú hodnotu (napr. otáčanie volantom pričom želaná hodnota je natočenie predných kolies).
- Riadenie na poruchu – ak želanú hodnotu dlhodobo nemeníme, ale zato v systéme vystupujú poruchy.
Porucha
Porucha znamená zmenu takej hodnoty, ktorú nemôžeme ovplyvniť, ale sa jej môžeme len prispôsobiť (alebo ju predvídať) ako napríklad zväčšenie záťaže motora, zvýšený odber tepla z kotla domácnosťami, pri elektrárňach zvýšený odber elektriny domácnosťami, atď.