Reluktanční motor
Reluktanční motor je typ elektrického motoru, který pracuje na principu změny reluktance (magnetického odporu) magnetického obvodu motoru. Existuje několik druhů reluktančních motorů podle způsobu, jímž je motor provozován:
- Synchronní reluktanční motor
- Spínaný reluktanční motor
- Krokový reluktanční motor
Konstrukčně a principiálně jsou všechny tři uvedené synchronními stroji.
Reluktanční motor může mít velký výkon při nízké ceně. Díky tomu je ideální pro mnoho aplikací.
Nevýhodou je velké kolísání kroutícího momentu při práci na nízkých otáčkách. To je příčinou hlučnosti. Dříve bylo použití tohoto motoru omezené pro obtížnost návrhu a jeho řízení. Tyto problémy jsou již překonané díky pokroku v teorii a použití numerických vývojových nástrojů při návrhu motorů a díky levným mikropočítačům (MCU) použitým pro řízení motorů.
Konstrukce a princip činnosti
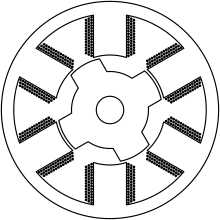
Stator je konstruován z magneticky měkkého materiálu (např. laminovaná křemíková ocel - dynamoplechy) a má více vyjádřených (vystouplých) magnetických pólů, podobně jako u stejnosměrného motoru. Stator může mít třífázové vinutí uložené v drážkách jako u běžných asynchronních a synchronních motorů. Rotor s vyniklými póly je z magneticky měkkého materiálu.
Reluktanční motor je možno zjednodušeně popsat jako podkovovitý elektromagnet, který se pohybuje nad feromagnetickým hřebenem, který má stejné vzdálenosti zubů jako podkovovitý elektromagnet. Podkovovitý elektromagnet unáší za sebou hřeben. Reluktance (magnetický odpor) mezi póly rotoru je mnohem menší než přes mezery mezi póly. Spřažený magnetický tok stroje, buzený statorem, unáší s sebou rotor. Pokud zatěžovací moment zátěže překročí moment motoru přeskočí spřažený magnetický tok na další dvojice pólů rototru a může pokračovat v práci.
Počet pólů rotoru je obvykle stejný (nebo celistvý násobek) jako počet magnetických pólů statoru magn. pólů třífázového statoru. Násobek počtu pólů rotoru snižuje kolísání kroutícího momentu. Pokud magnetické osy pólů statoru a magnetické osy rotoru leží v jedné přímce, kroutící moment na výstupní hřídeli je nulový. Oddálením magnetických os je vyvolána síla, která se snaží osy vyrovnat. Při překročení zatěžovacího úhlu dojde k utržení a přeskočení spřaženého mg. toku a jeho uzavření dalšími zuby.
Reluktanční motor je schopen rozběhu z nulových otáček. Rotor může fungovat jako rotor asynchronního motoru.
Na pólu statoru je navinuto elektrické vinutí fáze. Když vinutím protéká proud, je v pólu statoru a přilehlém pólu rotoru indukován spřažený magnetický tok. Pokud nejsou tyto póly zarovnány, pak mezi nimi působí síla která se snaží maximálně zvýšit jejich vzájemné zarovnání - snížit reluktanci a zvětšit plochu, kterou se póly překrývají. Síla působí ve směru zvětšujícího se překrytí. Je to stejný jev jako u jádra vtahovaného do cívky solenoidu nebo u feromagnetického materiálu přitahovaného k magnetu. Když jsou tyto póly zarovnány - plocha překrytí se při vzájemném pohybu pólů statoru a rotoru nezvětšuje - pak je síla nulová. Úlohu pólů působících přitažlivou silou mohou převzít další póly s vinutím jiné fáze, u kterých se zarovnání bude zvětšovat.
Jiný způsob vysvětlení: Když se překrytí pólu statoru a pólu rotoru zmenšuje, pak se zvyšuje reluktance (magnetický odpor) části magnetického obvodu těchto pólů. Pokud póly protéká magneticky tok, pak mezi nimi působí síla která se snaží reluktanci zmenšit. Směr působení síly je shodný se směrem zvětšujícího se překrytí pólů.
Typy reluktančních motorů
Synchronní reluktanční motor
Tento motor má stejný počet statorových a rotorových pólů. Obvyklý počet pólů je 4 až 6. Motor pracuje na synchronní rychlosti a nemá vodivé části na rotoru. Rotorem neprotéká žádný proud a motor tak má minimální ztráty energie v rotoru v porovnání s indukčním asynchronním motorem.
Motor roztočený na synchronní rychlost může pracovat na střídavé sinusové napětí, jaké je v elektrické síti. Regulace rychlosti je možná použitím frekvenčních měničů.
Spínaný reluktanční motor
Tento motor má menší počet pólů. Má menší konstrukční cenu než jiné průmyslové elektrické motory, protože je jednodušší. Je používán pro aplikace, kde musí rotor zastavovat v jedné pozici, a v prostorech s nebezpečím výbuchu, jako jsou doly, protože nemá mechanický komutátor.
Fázová vinutí na těchto motorech jsou navzájem elektricky izolovaná. To zaručuje lepší odolnost při řízení motoru frekvenčním měničem. Optimální tvar fázového buzení není sinusový vzhledem k nelineárnímu kroutícímu momentu rotoru a vysoké závislosti indukčnosti fázového vinutí na pozici rotoru.
Použití
- některé pračky prádla
- ovládání regulačních tyčí v jaderných reaktorech
Odkazy
Literatura
- Ing. Stanislav Pekárek: T 5 - Alternátory motorových vozidel a samojízdných strojů, publi.cz; Popis principu, konstrukce a také zapojení a regulace buzení. Kniha: Technologie oprav 1. Vydavatel: Střední škola technická a zemědělská, NOVÝ JIČÍN. Code Creator, s.r.o.; distribuce publi.cz; 2016. ISBN 978-80-88058-23-6. Navštíveno 2019-09-08.
Související články
Externí odkazy
 Obrázky, zvuky či videa k tématu reluktanční motor na Wikimedia Commons
Obrázky, zvuky či videa k tématu reluktanční motor na Wikimedia Commons