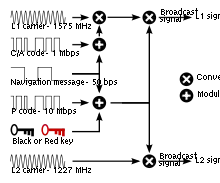
Rádiové signály GPS
Družice systému GPS vysílají radiové signály, které umožňují uživatelům určovat svou polohu a čas. Původní plán výstavby systému GPS počítal se dvěma různými kódy:
- C/A kód (Coarse / Acquisition code), který je veřejně dostupný
- P kód (Precision code), který je přístupný jen autorizovaným uživatelům
a v plánované modernizaci GPS III se připravují:
- C kód (Civilian code), který bude veřejně dostupný
- M kód (Military code), který bude přístupný jen autorizovaným uživatelům
Současné a plánované signály
| Pásmo (Frekvence) | Modulace na nosnou vlnu | Současný stav | Plánovaná modernizace |
|---|---|---|---|
| L1 (1575,42 MHz = 10,23 MHz × 154) | In-Phase (I) | Precision P(Y) kód | Precision P(Y) kód Military (M) kód |
| Quadra-Phase (Q) | Coarse-acquisition (C/A) kód | Coarse-acquisition (C/A) kód L1 Civilian kód | |
| L2 (1227,60 MHz = 10,23 MHz × 120) | In-Phase (I) | Precision P(Y) kód | Precision P(Y) kód Military (M) kód |
| Quadra-Phase (Q) | L2 Civilian kód | ||
| L5 (1176,45 MHz = 10,23 MHz × 115) | In-Phase (I) | Safety-of-Life (SoL) Pilot signál | |
| Quadra-Phase (Q) | Safety-of-Life (SoL) Data signál |
Modulace a demodulace
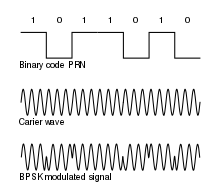
Pro přenos dat D(t) se používá fázová modulace (PSK, Phase Shift Keying) s binárním klíčováním (BPSK, Binary Phase Shift Keying), tj. data jsou modulována změnou fáze (Např. 0 = 0° a 1 = 180°). Rychlost přenosu je pouze 50 bit/s. Na jedné frekvenci se současně vysílá In-Phase (soufázová složka) a Quadra-Phase (protifázová složka) tj. sin(ωt) + cos(ωt). Signál každé družice je před vysíláním modulován pseudonáhodnou posloupností (PRN) kódu s hodnotami +1 nebo −1. Tyto sekvence vycházející z Goldových kódů, každý je 1023 bitů dlouhý a k jejich realizaci se používají 2 posuvné zpětnovazební registry. PRN je přitom zopakována každou ms, což vede k čipové rychlosti 1,023 Mbit/s. Vojenská data P(Y) mají desetinásobnou rychlost, tedy 10,023Mbit/s. To je základem určení nosné frekvence signálu pro různá pásma (L1 = 154 f0 = 154 × 10,023 MHz = 1 543 MHz). Každá družice je jednoznačně určena svým vlastní PRN v rozmezí 1-37. K rozlišení se tedy používá technika CDMA (Code Division Multiple Access). PRN se též často označuje jako Ranging Code, neboť jeho prostřednictvím se potom v přijímači odhaduje vzdálenost satelitu od uživatele pomocí autokorelační funkce daného kódu. Přesnost přitom závisí na ostrosti této funkce. Kódy jsou navrženy tak, aby měly pouze jedno ostré maximum a aby vzájemná crosskorelace byla co nejnižší (Striktně vzato nabývá autokorelační funkce pouze diskrétních hodnot [-65 -1 63 a 1023 ], oproti tomu crosskorelační funkce 2 PRN kódů pouze hodnot [-65 -1 a 63]. Zisk daného PRN je úměrný 1/N kde N značí délku kódu). Obecně se tato technika nazývá DSSS (Direct Sequence Spread Spectrum) a v praxi znamená, že výsledný signál nemá spektrum pouze na nosné frekvenci, ale jeho spektrum je poměrně široké a v mnohých případech je skryto za šumem a signál není vidět. Pro soufázovou složku signálu lze použít následující zjednodušený vztah kde C(t) je použitý PRN kód:

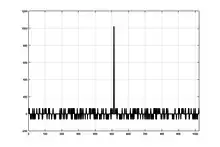
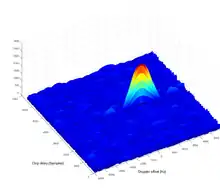
Přijímač se musí zasynchronizovat na maximum dané autokorelační funkce. To ovšem není tak snadné, protože ve skutečnosti se musí brát v úvahu Dopplerův offset,který vzniká v důsledku vzájemného pohybu uživatel-družice. Prakticky je tento offset závislý též na stabilitě oscilátoru, ale dá se předpokládat, že je v rozmezí cca(- 6 kHz až +6 kHz) v závislosti na tom, jestli se družice oddaluje, nebo přibližuje. Přijímač tedy sice hledá maximum autokorelační funkce, ale ve 2D prostoru. Pokud bychom vzali v potaz i více družic, tak se jedná o 3D prostor, kde třetí dimenze značí počet družic. Vzhledem k náročnosti výpočtů se pro počáteční akvizici používají výkonné DSP a jiné akcelerátory. Přitom samotné vyhledávání většinou probíhá v diskretizované mřížce (diskretizace v čase a frekvenci) daného prostoru. K nalezení maxima se dá použít prostá integrace signálu nebo například DBZP (Double Block Zero Padding) technika. Přesnost nalezení maxima závisí na SNR signálu, detailu diskretizační sítě a doby integrace. Právě doba integrace hraje velmi důležitou roli. Bohužel maximální doba je závislá na periodě datové rychlosti, tedy 1/50 = 20 ms. Tento problém je adresován například v Evropském systému Galileo, kde jedna složka signálu slouží pouze a výhradně jako ranging code bez jakékoliv další modulace. Opět se dá nalézt zjednodušený vztah přijímaného signálu pro L1 pásmo:

Zde A představuje pouze amplitudu signálu, D(t) jsou data (BPSK), C(t) je dálkoměrný kód, ε odpovídá zpoždění signálu,fD je dopplerův offset,Φ0 je fáze signálu a n(t) představuje přidaný bílý gaussovský šum (AWGN - Additive White Gaussian noise). Ke správnému určení polohy uživatele je třeba najít alespoň 4 satelity. Ke každému satelitu je poté určena pseudovzdálenost, která se dále musí korigovat (Ionosférická refrakce atd.). Tato vzdálenost odpovídá zpoždění signálu ε přepočítanému pomocí rychlostí světla na vzdálenost. Ke zjištění pozice se poté může použít některá z doporučených metod (kalmanova filtrace, Least Mean Square Error...). Po počáteční akvizici již není nutné pokaždé vyhledávat v celém 2D/3D prostoru, ale omezit ho na část,kde se vyskytuje družice.
Současné signály
C/A kód
C/A kód je 1 023 bitů dlouhá sekvence čísel PRN (Pseudorandom Number), která je vysílána rychlostí 1,023 Mbit/s, opakuje se tedy každou milisekundu (10−3s).
Každá družice používá jiný kód, celkem 32 pro družice a 5 pro zvláštní užití, přičemž tyto kódy se vybírají z množiny Goldových posloupností. To jsou posloupnosti, které jsou vzájemně málo korelované a přitom vedlejší maxima autokorelační funkce jsou zanedbatelné.
P(Y) kód
P kód je také PRN kód, přibližné délky 2,35×1014 bitů, který je rozdělen na 38 sekvencí, kde 32 je vyhrazeno družicím a 6 rezervováno pro jiné použití. Délka jedné sekvence pro jednu družici je 6,1871×1012 bitů a při datové rychlosti 10,23 Mbit/s se opakuje jednou týdně. Velká délka P kódu zajišťuje zvýšenou korelovatelnost a eliminovanou nejednoznačnost.
P(Y) kód je asymetricky šifrovaný P kód. Šifrování se nazývá AntiSpoofing (A-S) a provádí se za účelem ověření pravosti signálu z družic od 31. ledna 1994[1]. Je provedeno modulováním Y kódu P × Y = P(Y), jehož dešifrování mohou provádět pouze autorizovaní uživatelé pomocí W kódu P = P(Y) × W. Detaily Y i W kódu podléhají vojenskému utajení, ale na základě charakteristik signálu je jeho rychlost 511,5 kHz (f0=10,23 MHz/20) s opakováním 1× týdně [2].
Původně se používal systém PPS-SM(Precise Positioning Service-Security Module), kdy dočasný červený kód (Red key) byl do přístroje zaváděn periodicky na certifikovaném pracovišti. Nový systém SAASM (Selective Availability / Anti-Spoofing Module) který je zaveden od září 2006 používá pro dekryptování černý klíč (Black key), který je obnovován bezdrátovým přenosem. SAASM systém je oproti původnímu PPS-SM postaven tak, aby na počátku výpočtu polohy nebylo nutné používat civilní signál pro stanovení času. Dále má větší odolnost proti rušení a bude nahrazen až M kódem po modernizaci vesmírného segmentu[3].
Navigační zpráva

Navigační zpráva je modulovaná zvlášť na signál. Skládá se 25 rámců, jejichž odvysílání trvá 12,5 minuty. Každý rámec obsahuje 5 podrámců, které obsahují data:
- 1. podrámec - číslo týdne v časové referenci GPS, korekce pro atomové hodiny a zdravotní stav dané družice
- 2. podrámec - efemeridy dané družice 1. část
- 3. podrámec - efemeridy dané družice 2. část
- 4. podrámec - almanach a zdravotní stav družic 25-32, data pro ionosférický model, stav vysílání režimu AntiSpoofing
- 5. podrámec - almanach a zdravotní stav družic 1-24
Podrámec 1., 2. a 3. je obsahově stejný v každém rámci, aktualizuje se po několika hodinách. Podrámec 4. a 5. nese v každém rámci jen 1/25 dat (tzv. stránky), aktualizuje se po několika dnech.
Každý podrámec je dělen do 10 slov, každé po 30 bitech. První slovo je vždy telemetrické (TLM, Telemetry Word) a nese informaci o začátku podrámců. Druhé slovo je předávací (HOW, Handover Word) a obsahuje pořadí podrámce v aktuálním týdnu GPS (7×24×60×2×5=100 800 možných hodnot) a pořadové číslo podrámce v aktuálním rámci. Ostatní slova mají ze 30 bitů informačních jen 24, zbývajících 6 paritních bitů slouží k zabezpečení přenosu kanálového kódování, které se provádí pomocí Hammingova kódu (32,26) se vzdáleností 4. Tento mechanismus umožňuje detekovat ve slovu 3 chybné bity nebo 1 opravit. Protože jeden bit trvá 20 ms, je slovo dlouhé 0,6 s, podrámec 6 s a každý rámec 30 s.[4]
Části navigační zprávy se distribuují i mimo radiové vysílání družic ve zvláštních souborových formátech (YUMA, SEM, SP3) aktuální almanach. Využití je především k urychlení času mezi spuštěním a získáním první polohy (TTFF, Time to First Fix), nebo plánování měření.
Modernizace
| Signály | Blok družic | IOC | FOC |
|---|---|---|---|
| C/A, P | I, II, IIA | 1993 | – |
| C/A, P(Y) | II, IIA | – | 1995 |
| C/A, P(Y), M, L2C | (IIA, IIR), IIR-M, IIF | 2011 | – |
| C/A, P(Y), M, L2C | (IIR), IIR-M, IIF, III | – | 2016 |
| C/A, P(Y), M, L2C, L5 | (IIR, IIR-M), IIF, III | 2015+ | – |
| C/A, P(Y), M, L2C, L5 | (IIR-M), IIF, III | – | 2018+ |
| C/A, P(Y), M, L2C, L5, L1C | (IIR-M, IIF), III | 2018+ | – |
| C/A, P(Y), M, L2C, L5, L1C | (IIF), III | – | 2021+ |
Po uvedení systému GPS do plného provozu (FOC) v roce 1995 se v roce 1998 začal plánovat a v roce 2000 byla schválena modernizace celého systému, který byl nazván GPS III. Projekt plánuje nové pozemní stanice i družice, další civilní i vojenské frekvence i signály, zvýšenou dostupnost a přesnost. Některé technologie jsou dostupné s družicemi bloku IIR-M vypouštěnými od roku 2005, další IIF od roku 2009, poslední fáze modernizace bude až s blokem III.
L2C kódy
Nový civilní signál L2C má přinést především eliminaci ionosférické refrakce vysíláním na dvou frekvencích.
Pro L2C kód jsou definovány dvě PRN sekvence:
- CM kód (Civilian Moderate code - data signal) je dlouhý 10,230 bitů, opakuje se po 20 ms. CM je navíc modulován s navigační zprávou o rychlosti 25 bit/s.
- CL kód (Civilian Long code - pilot signal) je dlouhý 767,250 bitů, opakuje se po 1 500 ms.
Na rozdíl od původního P(Y) kódu je postaven tak, aby na počátku výpočtu polohy bylo nutné používat civilní signál pro synchronizaci hodin.
Celý signál je vysílán 511,500 bit/s, ale je násoben na principu kódového multiplexu na 1,023 Mbit/s s využitím techniky FEC (Forward Error Correction) pro eliminaci chyb. Charakteristika L2C signálu předpokládá vyšší ochranu přenosu, lepší korelovatelnost, vyšší vysílací výkon než L1 C/A signál. V jednoduché jednofrekvenční aplikaci má L2C o 65 % větší chybu v ionosférické refrakci než L1 C/A.
Modulační technika bude využívat pro datový signál BOC(1,1), pro pilot signál TMBOC(1,1) na nosné vlně. Časový posun nosné vlny (TMBOC, Time Modulated Binary Offset Carrier) je BOC(1,1) pro všechny s výjimkou 4 z 33 cyklů nosné vlny, které přechází na BOC(6,1).
M kód (L1M, L2M)
M kód (Military code) má nahradit stávající vojenský P(Y) kód na obou frekvencích L1 a L2.[7] Signál bude vysílán širokoúhlou anténu pro pokrytí celé hemisféry země rovnoměrným signálem. Nadto bude použita také směrová anténa umístěná mimo tělo družice, kterou bude možno natáčet a regionálně (několik set kilometrů v průměru kruhu) zvýšit sílu signálu až o 20 dB. Směrová anténa bude dostupná na družici bloku III, signál na širokoúhlé anténě již od bloku IIR-M. Pro M kód se bude využívat binární modulace se zpožděnou nosnou (BOC, Binary Offset Carrier) na šířce pásma 24 MHz.
Bude vysílán zároveň s novou navigační zprávou (MNAV, Military Navigation message), která využívá pakety(packet) místo původních rámců(frame) pro pružnější využití obsahu zprávy. Pro kontrolu chyb při přenosu používá techniku FEC (Forward Error Correction). Signál vysílaného M kódu by měl mít pokrytí –158 dBW se širokopásmovou anténou a –138 dBW pro směrovou anténu.
L5 signály (Safe of Life)
Signál SoL(Safety of Life) je určen pro civilní využití, kde je třeba garantovat kvalitu polohovací služby natolik, aby bylo možno ihned rozpoznat a eliminovat chybu části nebo celku systému, např. navigace v letectví. Má být vysílán na frekvenci L5 (1176.45 MHz) technologicky implementované do družic bloku IIF. Využívá mezinárodně rezervované pásmo pro letectví. Skládá se z 10 230 bitů dlouhých kódů vysílaných 10,23 Mbit/s, tedy frekvencí 1ms:
- I5 signál modulovaný s 10bit Neuman-Hofman kódem o rychlosti 1 kHz a navigační zprávou CNAV
- Q5 signál modulovaný s 20bit Neuman-Hofman kódem o rychlosti 1 kHz
Využívá širší pásmo a vyšší výkon oproti L1 nebo L2C, má delší sekvenci PRN kódu. Pásmo L5 je mezinárodně rezervované pro letectví s nízkou mírou rušení.
L1C kódy
L1C (Civil code) jsou kódy se stejnou definicí jako L2C a budou dostupné s první družicí bloku III. L1C bude vysílaný společně s C/A kódem na L1 frekvenci (1575,42 MHz), který bude mít sníženou dostupnost, ale pro zachování zpětné kompatibility zůstane zachován. L1C signál bude odlišitelný od signálů na L1 vysílaných družicemi systému Galileo a tudíž slučitelný.
CNAV/MNAV Navigační zpráva
Nová CNAV (Civilian Navigation message) navigační zpráva bude obsahovat stávající data, ale vysílány budou v novém formátu:
- současné rámce budou nahrazeny systémem 300bit dlouhých pseudopaketů (packet). To umožní jeho změny a úsporu šířky datového pásma.
- bude použita ochrana chyb FEC (Forward Error Correction) s poloviční rychlostí vysílaného signálu tj. pro data 25 bps bude mít výsledný signál 50 bps.
- číslo nesoucí časovou značku GPS týden (GPS week) bude rozšířeno z 10- na 13bitové a max. hodnota bude 8 192 tak, že jeho vyčerpání bude jednou za 157 let.
- každý paket ponese informaci o zdravotním stavu družice, tedy během několika sekund bude možno nezdravou družici vyřadit z výpočtu. To zvýší bezpečnost pro aplikace typu Safety Of Life.
- navigační zpráva bude podporovat až 63 družic.
O navigační zprávě autorizovaných signálů MNAV (Military Navigation message) nejsou zveřejněny žádné podrobnosti, lze ale předpokládat, že bude mít obdobnou strukturu jako CNAV.
Odkazy
Reference
- How good is GPS? Archivováno 5. 4. 2008 na Wayback Machine Chris Rizos, SNAP-UNSW. 1999
- Hatch, R. R.:[http://www.ima.umn.edu/talks/workshops/8-16-18.2000/hatch/hatch.pdf GPS Carrier-Phase Ambiguity Resolution 17. srpen 2000
- SAASM and Direct P(Y) Signal Acquisition Archivováno 16. 12. 2008 na Wayback Machine. Hugo Fruehauf, Steve Callaghan. 1. červen 2002
- Příjem navigační zprávy GNSS Archivováno 16. 8. 2007 na Wayback MachineLeoš Junek. 28. červenec 2006
- Federal Radionavigation Plan Archivováno 27. 9. 2007 na Wayback Machine. Department of Defense. 18. říjen 2005
- Tom Powell: GPS Wing Update Archivováno 21. 12. 2008 na Wayback Machine, U.S. Air Force, GPS Wing. 15. září 2008
- Betz, J. W., Fite, J. D., Capozza, P. T.: Getting to M Archivováno 11. 1. 2008 na Wayback Machine. GPS World. 1. duben 2005
Externí odkazy
- Rapant, P.: Družicové polohové systémy. VŠB-TU Ostrava, 2002. 200 str. ISBN 80-248-0124-8. dostupné on-line.
- Dana, P. H.: Global Positioning System Overview. Texas, 2000. dostupné on-line (anglicky)
- Junek, L.: Příjem navigační zprávy GNSS. ČVUT Praha, 2006 dostupné on-line.
- Uko, T.: navigace na FPGA ČVUT Praha, 2008 dostupné on-line.
- SNAP-UNSW's GPS Satellite Signals
- IS-GPS-200D - Specifikace L1 C/A a L2C
- IS-GPS-705 - Specifikace L5
- IS-GPS-800 - Specifikace L1C