Lunar Rover
Lunar Roving Vehicle (LRV) nebo lunar rover byl typ terénního průzkumného vozidla rover použitého na Měsíci během programu Apollo. Je také znám pod přezdívkou měsíční bugina (moon buggy). Tímto vozidlem byly vybaveny posádky letů Apollo 15, 16 a 17.
| Lunar Rover | |
|---|---|
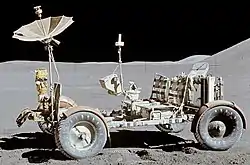 | |
| Výrobce | Boeing a General Motors |
| Hmotnost | 210 kg |
| Délka | 3,1 m |
| Výška | 1,14 m |
| Některá data mohou pocházet z datové položky. | |
Historie
Zakázka na výrobu tohoto vozidla byla zadána firmě Boeing s hlavním subdodavatelem firmou Delco s původním rozpočtem 19 milionů USD. První kus měl být dodán 1. dubna 1971 a původní rozpočet 19 milionů USD byl nakonec překročen až na 38 milionů USD. Celkem byly postaveny 4 kusy, každý po jednom pro Apollo 15, 16 a 17. Jedno vozidlo bylo použito jako náhradní. Byly postaveny i další modely, které sloužily k testování. Statický model byl použit k testování ergonomie, technický model pro vývoj a integraci podsystémů, dva modely s 1/6 hmotnosti pro testování rozmístění mechanismů a jeden model s normální hmotností byl určený k tréninku astronautů. Tento model jim umožnil trénink ovládání na Zemi. Byl také vytvořen hmotnostní model pro test vlivu roveru na lunární modul (LM) Apolla a test vibrací k určení odolnosti a ovladatelnosti během namáhání při startu.
LRV byly použity pro vyšší mobilitu posádek během výprav Apollo třídy J (Apollo 15, Apollo 16 a Apollo 17). Rover byl poprvé použit na Měsíci 31. července 1971 posádkou Apollo 15, což jí rozšířilo akční rádius průzkumu Měsíce. Předchozí výpravy se omezovaly pouze na pěší průzkum, omezený kapacitou kyslíku a vody ve vybavení skafandru. Rovery dosahovaly nejvyšší rychlosti kolem 13 km/h.
LRV byl vyvinut během pouhých 17 měsíců a na Měsíci pracoval bez vážnějších poruch. Harrison Schmitt z mise Apollo 17 řekl: „Rover byl spolehlivým, bezpečným a pružným měsíčním průzkumným vozem, jak jsme očekávali. Bez něj by byly hlavní vědecké objevy Apolla 15, 16 a 17 nemožné a tím pádem i současné pochopení vývoje Měsíce.“
Lunar Rover zaznamenal pouze několik menších závad. Během mise Apollo 16 byl ztracen zadní prodloužený blatník, když do něj John Young vrazil, když šel pomoci Charlesu Dukeovi. Prach, který pak odlétával od kola pokrýval posádku, kryty přístrojů a komunikační přístroje. Díky větší spotřebě energie se více zahřívaly baterie. Blatník u roveru Apolla 17 byl také poškozen, když do něj Eugene Cernan uhodil násadou od kladiva. Posádka se snažila upadlý kus přilepit lepicí páskou, ale protože vše bylo pokryto prachem, neměla páska dostatečnou přilnavost a proto kus blatníku asi po hodině jízdy ztratili. Během druhé výpravy byl kus blatníku vytvořen z map, lepicí pásky a páru úchytek z lunárního modulu - původně zamýšlených k upevnění pohyblivých světel. Po skončení jízd posádka úchytky znovu použila uvnitř modulu pro start. Použité mapy byly přivezeny zpět na Zem a nyní jsou umístěny v muzeu National Air and Space Museum. Na některých částech blatníku jsou vidět oděrky od prachu.[1]
Barevná televizní kamera namontovaná na předku Roveru byla dálkově ovládána ve dvou osách z pozemního řídícího centra. To umožnilo lepší sledování průběhu výprav, protože se posádky nemusely zdržovat ovládáním kamery. Na konci pobytu astronautů na Měsíci velitel odvezl Rover do bezpečné vzdálenosti od lunárního modulu a namířil kameru tak, aby mohl být sledován start modulu z Měsíce.
Rovery NASA byly ponechány na měsíčním povrchu, čímž rozšířily seznam umělých objektů na Měsíci. Na tomto seznamu jsou také sovětská automatická vozítka Lunochod 1 a 2.
Možnosti a specifikace
Měsíční průzkumné vozidlo používané při misích Apollo byl elektromobil poháněný stříbro-zinkovými bateriemi navržený k provozu ve snížené gravitaci a vakuu na Měsíci. Mohl se pohybovat po měsíčním povrchu a dovoloval astronautům Apolla rozšířit okruh jejich pohybu.
Použití

Každý Rover byl použit na tři výpravy, každý den jedna během třídenního pobytu každé mise s individuálními výkony, jak je uvedeno níže.
| Mise | Celková ujetá vzdálenost | Celkový čas | Nejdelší výprava | Maximální vzdálenost od modulu |
|---|---|---|---|---|
| Apollo 15 | 27,76 km | 3h 02 m | 12,47 km | 5,0 km |
| Apollo 16 | 26,55 km | 3h 26 m | 11,59 km | 4,5 km |
| Apollo 17 | 35,89 km | 4h 26 m | 20,12 km | 7,6 km |
Provozování Roveru bylo uzpůsoeno tak, aby astronauti v případě poruchy Roveru byli schopni se vrátit zpět k lunárnímu modulu pěšky. Proto měly průzkumné cesty danou nejvyšší vzdálenost od lunárního modulu, která se nesměla překročit. Jednotlivé cesty proto začínaly jízdou do nejvzdálenějšího bodu, v němž byl zahájený průzkum, který pak pokračoval zastávkami na zpáteční cestě k modulu. Vždy se postupovalo podle momentálních zásob kyslíku v zásobnících skafandru.
Hmotnost a náklad
Rover měl hmotnost 210 kg a byl navržen pro provoz s užitečným nákladem dalších 490 kg na povrchu Měsíce. Rám byl 3 metry dlouhý, rozvor kol byl 2,3 metrů. Maximální výška byla 1,1 metrů. Rám byl vyroben z 2219 trubkových profilů z hliníkové slitiny svařených do tří částí, které byly zavěšeny uprostřed, což umožnilo rover složit a v lunárním modulu přepravit na Měsíc. Měl dvě sklápěcí sedadla z hliníkových trubek s nylonovou síťkou a podlahu z hliníkového plechu. Opěrka pro ruce byla umístěna mezi sedadly a u každého sedadla byla nastavitelná opěrka pro nohy a bezpečnostní pás Velcro. Velká parabolická anténa byla namontována uprostřed přední části Roveru. Tlumiče sestávaly z dvojice horizontálních vidlicových ramen s horní a dolní torzní tyčí a tlumičem mezi rámem a horním ramenem. Plně naložený rover měl světlost 35 cm.
Kola a výkon
Kola byla tvořena hliníkovým diskem s průměrem 32", pneumatika široká 9" vyrobena z pozinkované tkaniny z ocelových vláken o průměru 0,8 mm. Dezén z titanu pokrývající 50% kontaktní plochy k zajištění trakce. Uvnitř pneumatiky byl ochranný rám proti průrazu o průměru 25,5". Nad koly byly namontovány blatníky. Každé kolo mělo vlastní pohon, sériový stejnosměrný trakční motor o výkonu 200 W schopný točit 10 000/min pohánějící kolo přes harmonickou převodovku a vybaveno mechanickou brzdou. Manévrovací schopnosti byly zajištěny předními a zadními zatáčecími motory. Každý zatáčecí motor byl sériový stejnosměrný o výkonu 100 W. Obě nápravy byly řiditelné a umožňovaly dosáhnout nejmenší poloměr zatáčky 3 m, nebo mohla být jedna zablokována a jednou se dalo řídit. Napájení poskytovaly dvě stříbro-zinkové primární baterie s elektrolytem tvořeným hydroxidem draselným, které měly kapacitu 121 Ah a napětí 36 V. Sloužily k napájení trakčních a zatáčecích motorů a také pomocné zásuvky pro napájení televizní kamery nebo komunikačního zařízení v přední části vozu.
Řízení a navigace

Ovladač ve tvaru T umístěný mezi sedadly řídil čtyři poháněcí motory, dva zatáčecí motory a brzdy. Pohybem páky vpřed jelo vozidlo vpřed, doleva a doprava jelo vozidlo do stran, zatáhnutí zpět vozidlo zastavilo. Aktivace tlačítka na páce před zatáhnutím zpět sloužila ke zpětnému chodu. Zatáhnutí páky úplně dozadu aktivovalo parkovací brzdu. Řídící a zobrazovací moduly byly umístěny před řídící pákou a informovaly o rychlosti, kurzu, náklonu, teplotě a výkonu.
Navigace byla založena na průběžném načítání vzdálenosti a směru přes použití směrového ukazatele (gyroskopu) a odometru. Vkládáním těchto dat do počítače, který na jejich základě propočítával směr ukazující k modulu. Dále používal zařízení ke sledování slunečního stínu a navigaci s jeho pomocí.
Sestavení
Rover spustila posádka z lunárního modulu pomocí lan a kožených pásů na kladkách a brzděných cívkách. Rover byl složen a připevněn v části 1 se spodní částí rámu směřujícím ven z modulu. Jeden astronaut vylezl po žebříku modulu a uvolnil Rovera, který byl potom spuštěn dolů za druhým astronautem pomocí lan a popruhů. Po spuštění se vůz automaticky složil. Zadní kola se sklopila a zajistila a když se dotkla povrchu Měsíce tak se sklopila přední část rámu a uvolnila se také přední kola. Celý rám se zajistil a Rover mohl být položen na povrch. Posádka následně zapojila kabely a konektory. Pak se mohly zvednout opěradla sedadel a nohou. Po zapnutí všech elektrických systémů byl Rover připraven k jízdě.
Související články
Reference
- Experiment: Lunar Rover Vehicle [online]. Ares.jsc.nasa.gov [cit. 2008-10-14]. Dostupné v archivu pořízeném dne 2009-03-20. (anglicky)
Externí odkazy
 Obrázky, zvuky či videa k tématu Lunar Rover na Wikimedia Commons
Obrázky, zvuky či videa k tématu Lunar Rover na Wikimedia Commons - Boeing Lunar Rover Vehicle Operations Handbook
- Article about the rover
- LRV Operations Handbook, Appendix A (Performance Data)
- Mobility Performance of the Lunar Roving Vehicle: Terrestrial Studies – Apollo 15 Results
- Lunar Rover in Operation Video